Hi,
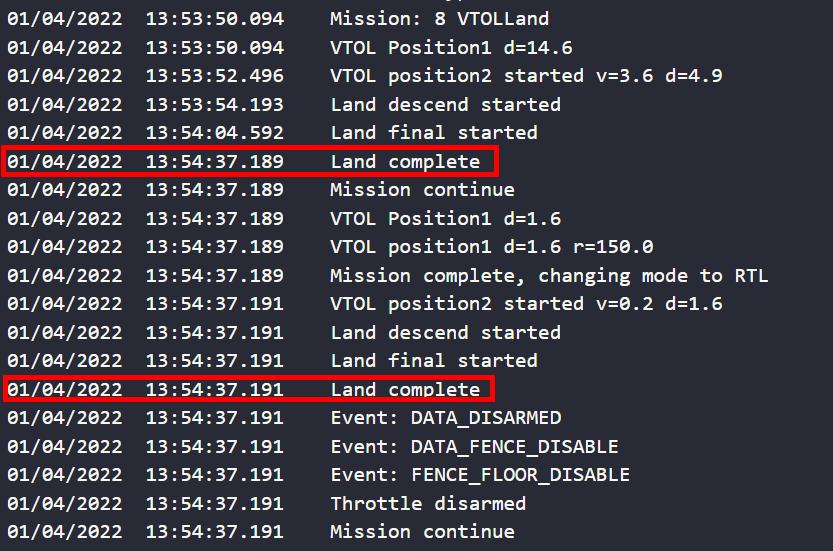
I performed the same mission five times to check the land performance of my VTOL and noticed that the aircraft didn’t disarm just after the second land (It took 20 seconds in some flights to disarm). It changed the mode to RTL:
The mission profile:
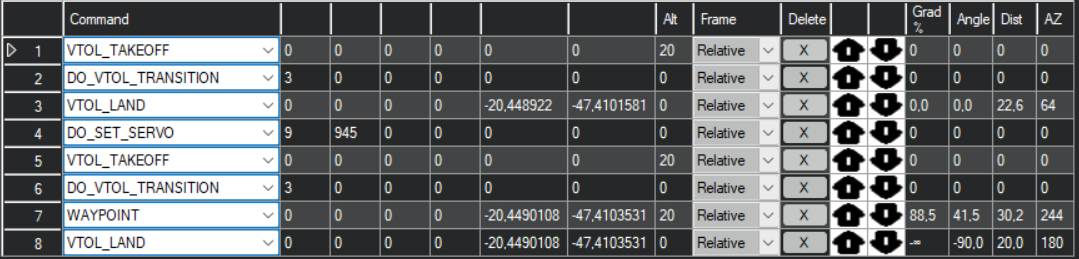
You can see more than one “Land Complete” message in all logs and messages attached. Obs: after the first “Land Complete” message, the motors spined as idle.
On flights 3 and 5, the aircraft threatened to take off again—the reason for the Event: DATA_MOTORS_EMERGENCY_STOPPED.
The logs and messages:
https://drive.google.com/drive/folders/1qYugWxAQxlU2crUzuKyZPJ2DqhrmQspI?usp=sharing
Is there any reason for this behaviour? How may I avoid it and the aircraft disarm after finishing the mission?