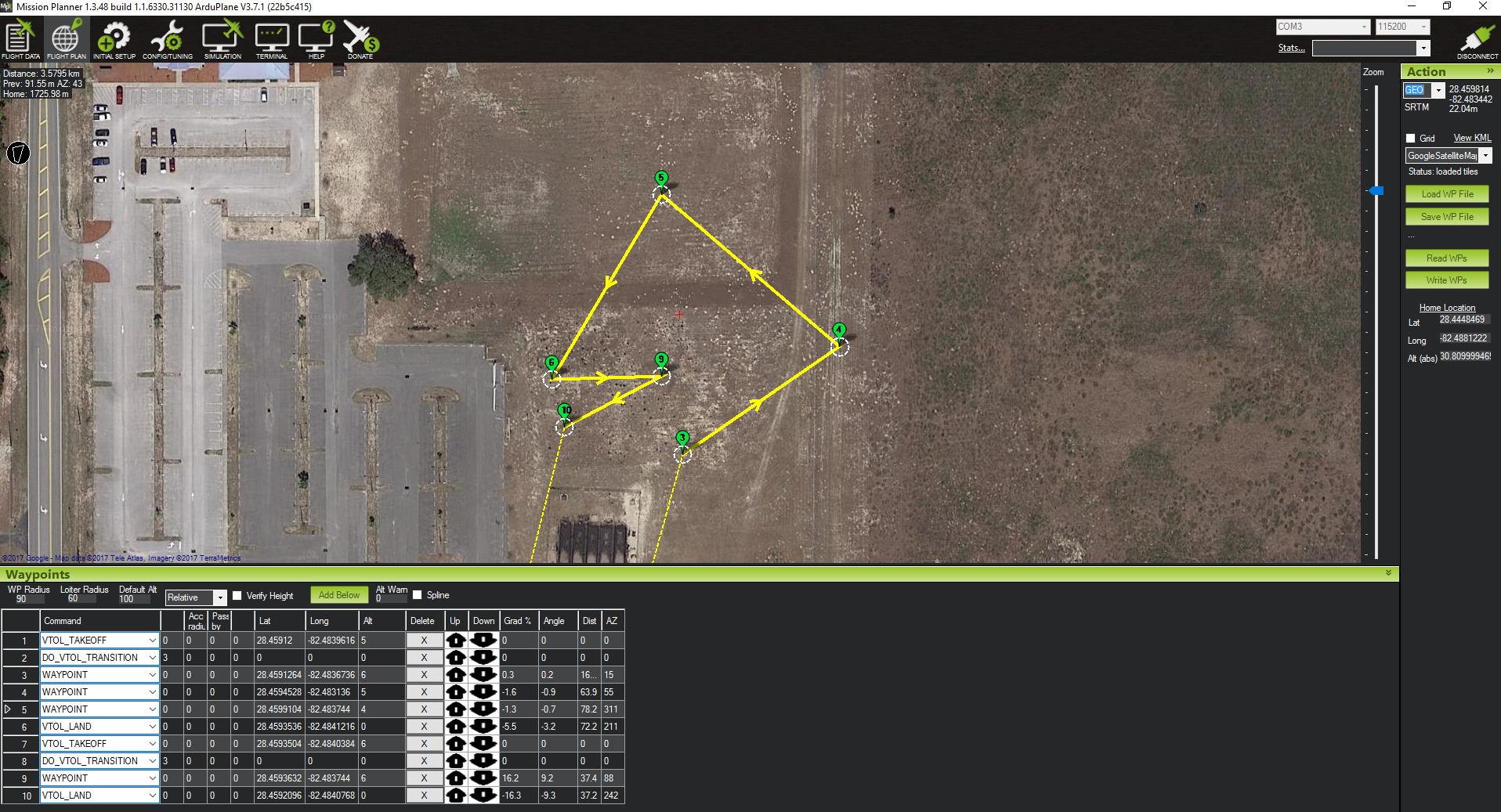
Has anyone tried to perform multiple VTOL take-offs and VTOL Lands in a single mission? So far, I am able perform a VTOL take-off, fly through waypoints and perform a single VTOL landing. However, the moment I land (via VTOL Landing) the quadplane disarms automatically. I’ve gone through the parameters and disabled Land_DisarmDelay (by assign it to “0”). However, at VTOL land, it still disarms the quadplane despite having more actions to perform in the auto mission. I’m guessing because we are dealing with a quadplane, there needs to be an additional setting tweaked somewhere. Please see screen shot for your reference.
Thank you MagicRuB for helping to clarifying why the issue occurs. Moreover, thanks for investigating it further. The objective at the end is to be able to make multiple lands and take-offs in a single mission autonomously. This will eventually be used for humanitarian aid and disaster relief missions.
You mentioned a potential fix in GitHub…can you steer me to the right direction? Is there a patch of some sort to I need to download?
Again, I greatly appreciate your assistance with this.
I posted a link to the pull request above, here’s specifically what I’m fixing. However, in an event to reuse an existing normal fixed-wing check I tried to use another function (that includes additional checks) and those are making it over complicated and it’s not disarming correctly. The automated simulator flew a mission and had trouble disarming so it failed the test… which is good that it caught it.
Thanks for the update. I greatly appreciate the efforts made by you and the rest of the dev community. I’m looking forward to a solution soon. Keep me posted.
Tom, I noticed on Github there seems to be a commit that fixes the auto disarm issue. Question, how can we incorporate the update you guys have provided? Is it through MP or some other method?