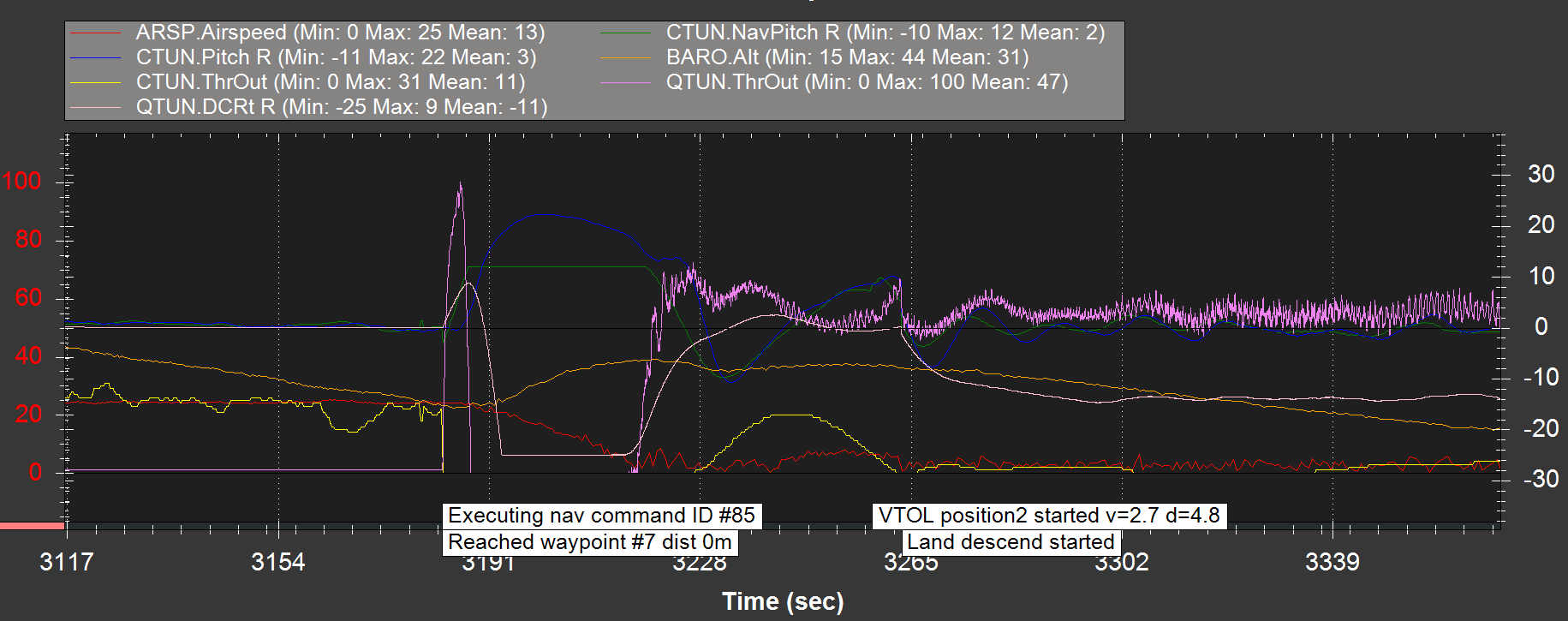
Heavy gas powered QuadPlane with Pixhawk and Arduplane 3.8 is doing transition from Fixed Wing to MC on land in Auto. WP before land is 25 m relative alt. After passing it UAV have a steep “jump” with lift motors rotating (at low throttle) up to 40 m.
What can cause that “jump”? UAV have excessive airspeed on last WP before land, but not too high. I saw that QTUN shows DCRt up and then down. And QTUN.DAlt is growing only when DCRt goes constrained to minimum down climb rate. As far as I understand it leads to Pitch Navigated saturation to Max Pitch. So pitch commanded up and lead to “jump”.
So why QTUN.DAlt increases when QTUN.DCRt is stripped from bottom?
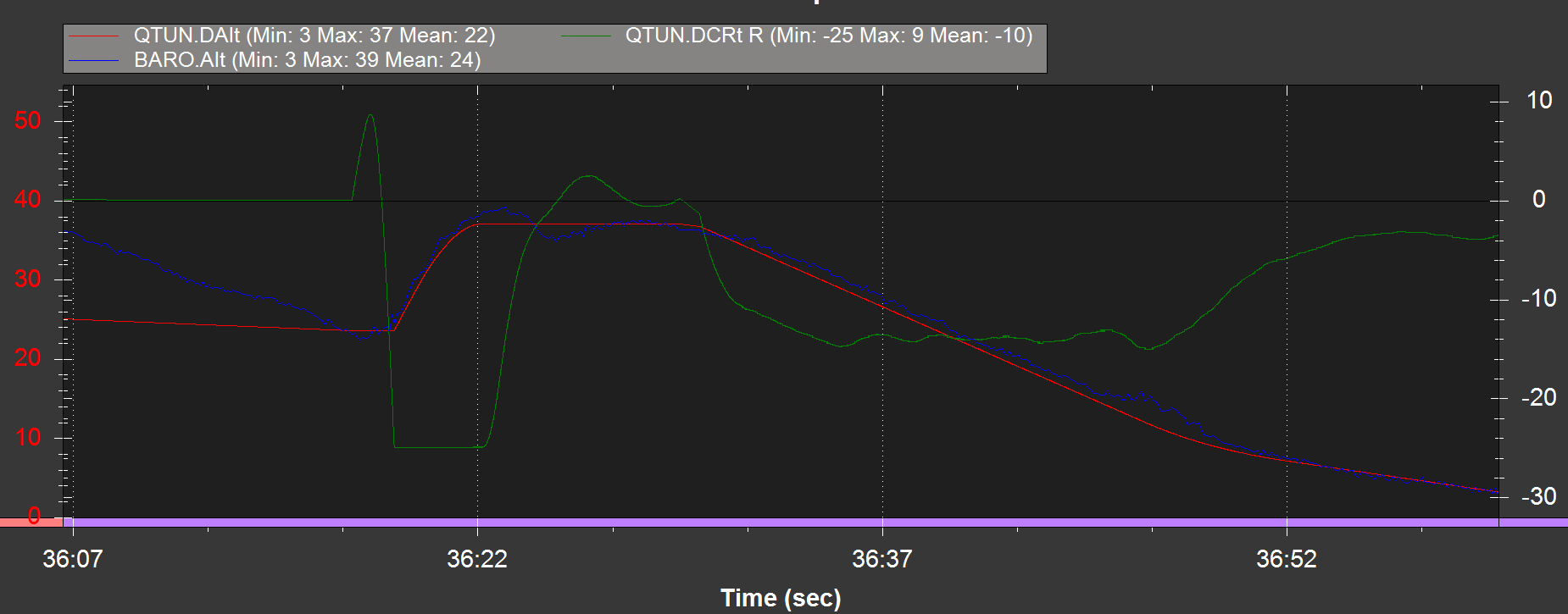
I have ran a couple of test quadplane flights on SITL previously, and it seems that this issue of quadplane “jumping” during the transition from fixed-wing to VTOL is also present. That means it is a normal occurrence in ArduPIlot (or a bug)
As we can see, the increase in altitude (AHR2.Alt) and actual/commanded pitch (CTUN.Pitch/NavPitch), as well as the constraint of desired climb rate (QTUN.DCRt) to minimum are similar to what is present in your screenshot.
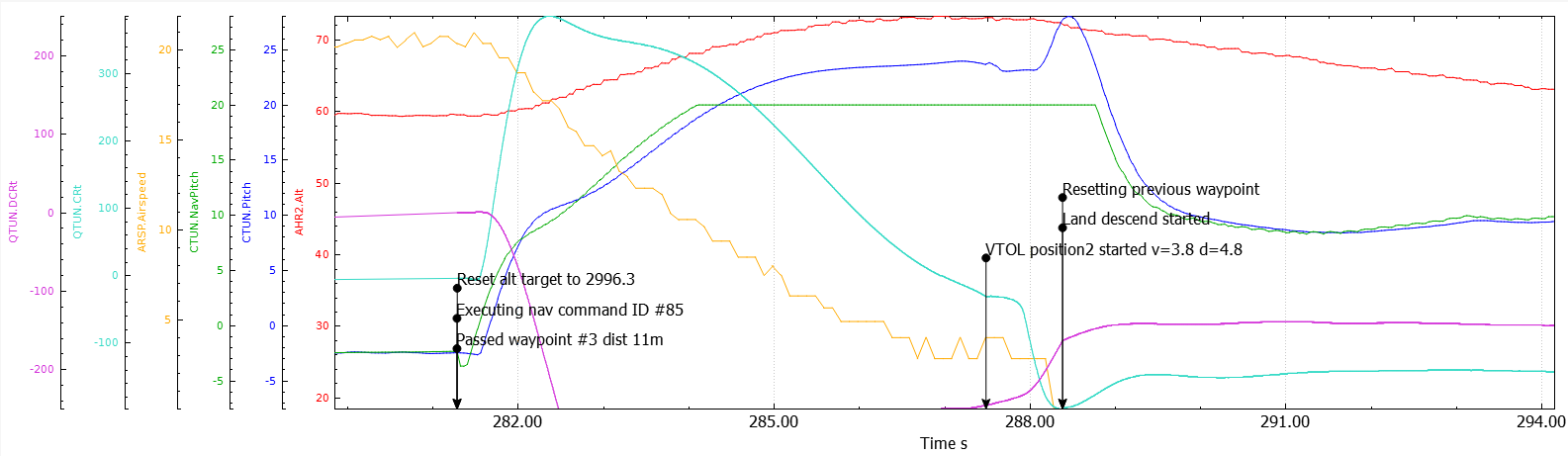
More interesting is the graph of the actual climb rate (QTUN.CRt), which shows that the aircraft is actually responding to the negative desired climb rate. However, the response is very slow, as we can tell from the gradual decrease in actual climb rate.
So let me attempt to explain what is happening:
When transition starts and the VTOL motors are activated, the quadplane has a natural tendency to pitch up and gain altitude (possibly due to the fact that when the quad motors start up with more than enough thrust to prevent the aircraft from losing altitude)
The autopilot notices this undesired increase in climb rate, and tries to compensate by lowering the desired climb rate
However, the response to this desired climb rate is very slow, despite the desired rate being set to a minimum.
Thus, by the time the actual climb rate has dropped sufficiently to stop the aircraft from climbing any further, the aircraft has already gained a significant amount of altitude.
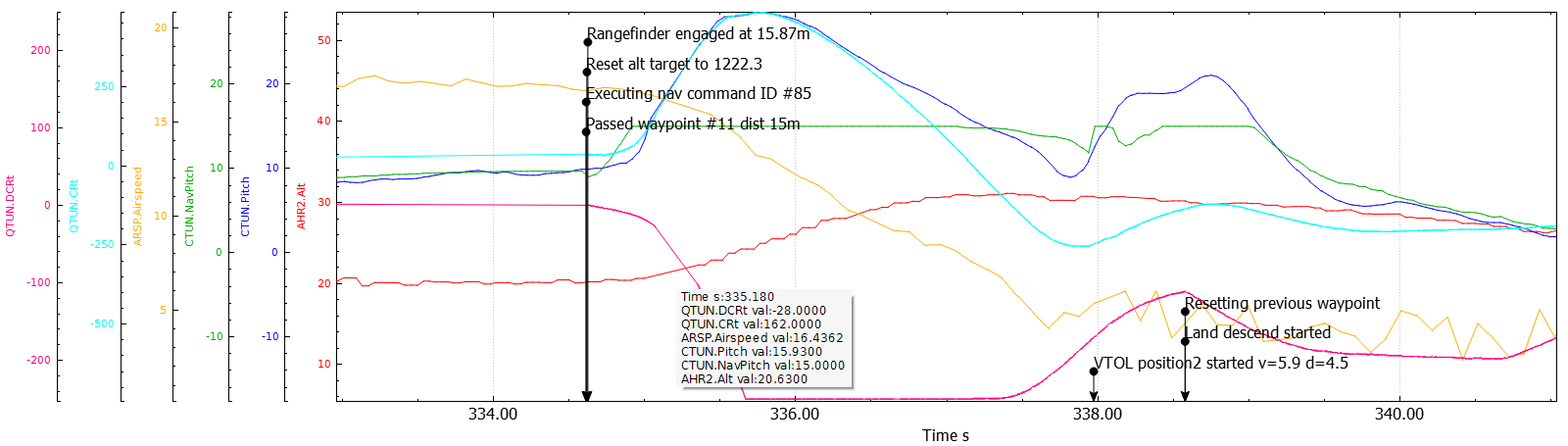
This is just what I can infer from looking at the logs, so it may not be fully accurate; if anyone has a better explanation please feel free to correct me.
Finally, here is another screenshot from the flight log of an actual quadplane which my teammates and I have flown previously, and it also shows similar behaviours when transiting back to VTOL mode:
I think I can understand why DAlt increases when DCRt saturated. It mean that if we need to have CRt over limit than we can’t keep desired altitude at all and have to change it. So arduplane behavior looks correct and the only thing that leads to “jump” is great target deceleration and UAV momentum. So we need to descend speed before transition as much as we can and than decelerate smoothly.