VTOL_LAND mission item with spiral approach does not work as expected. As plane enters VTOL_LAND mission, plane immediately calculates approach path using wind, sends message such as AP: Selected an approach path of -76.4 . Thus the plane does not loiter to alt(50m) and tries to approach and QLAND at high altitudes(~1100m) which very dangerous with our VTOL system.
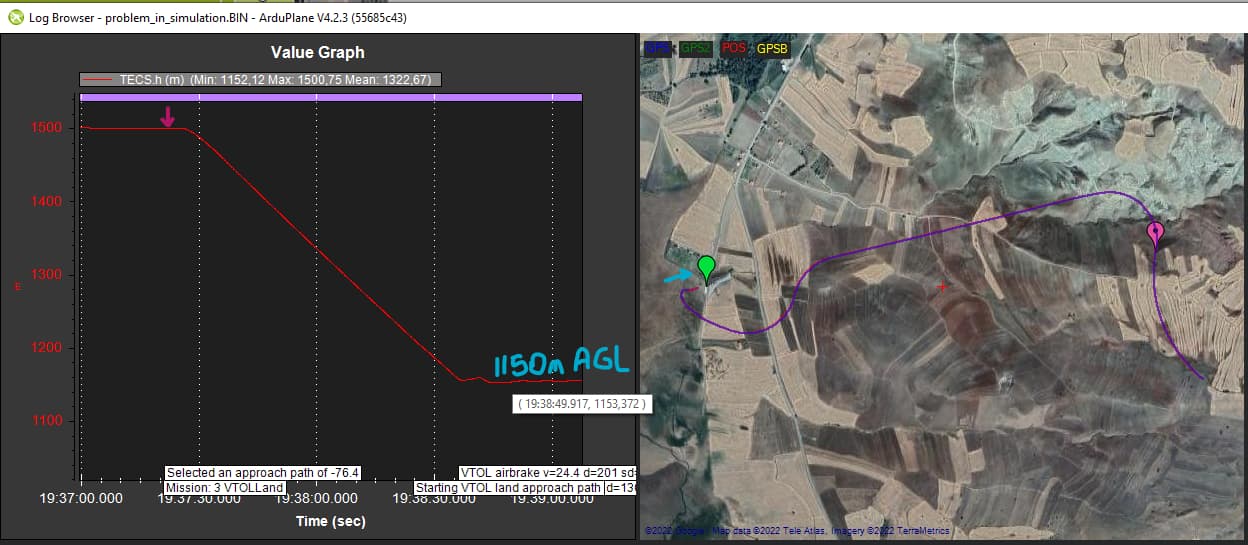
I was able to repeat the same error in 4.2.3 Arduplane simulation. I also had the same problem in 4.3 releases. You can access the log of the simulation here: https://drive.google.com/file/d/1SMZf9IHgA_wsLWKSiyXtj3uVU2D6_WvF/view?usp=share_link
Also another issue is VTOL_LAND mission does not hold current altitude while returning to landing position. It directly tries to descent VTOL_LAND altitude. We followed this guide : QuadPlane AUTO Missions — Plane documentation
Also log pictures from a real flight:
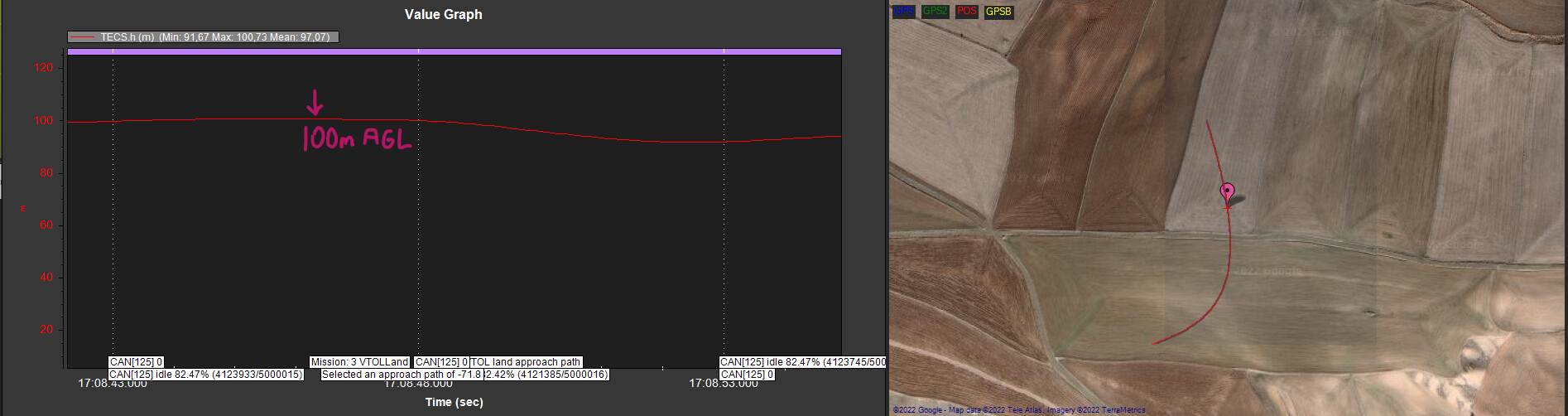
Calculates approach path immediately.
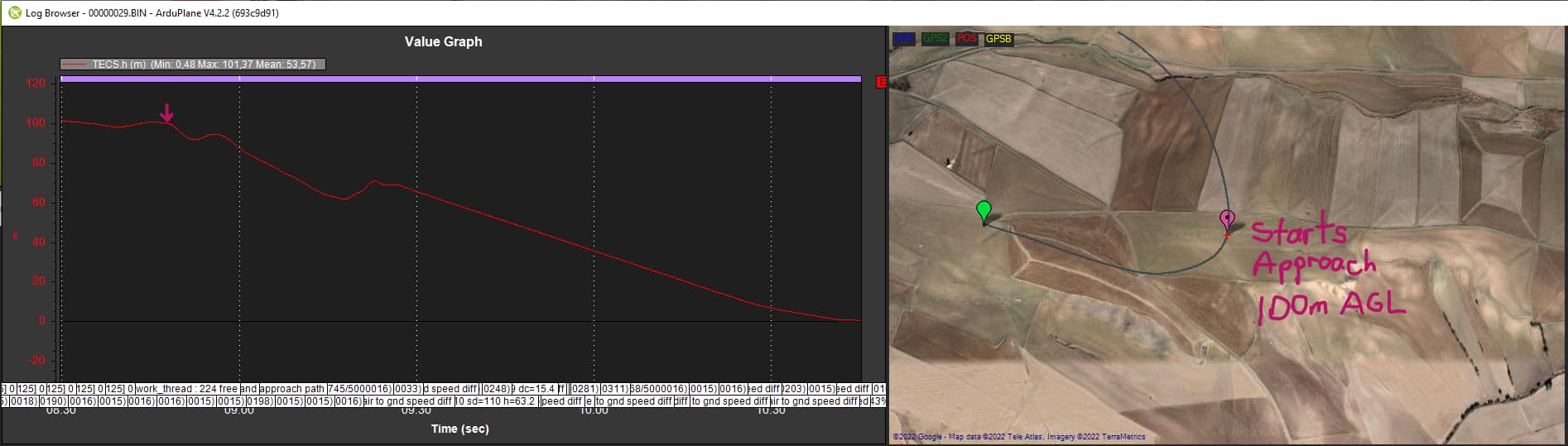
Plane entered approach path at 100m AGL even though VTOL_LAND item altitude was 50m AGL.
Log file of this flight: https://drive.google.com/file/d/1vNZpMlEWSa7ocRDIP2N_Voh4jgwFBP28/view?usp=sharing
Thanks in advance