I’m having difficulty with the Quadplane Hybrid RTL. Here are the pertinent params:
ALT_HOLD_RTL = 4000
Q_RTL_ALT = 20
Q_RTL_MODE = 1
RTL_AUTOLAND = 1
RTL_RADIUS = 60
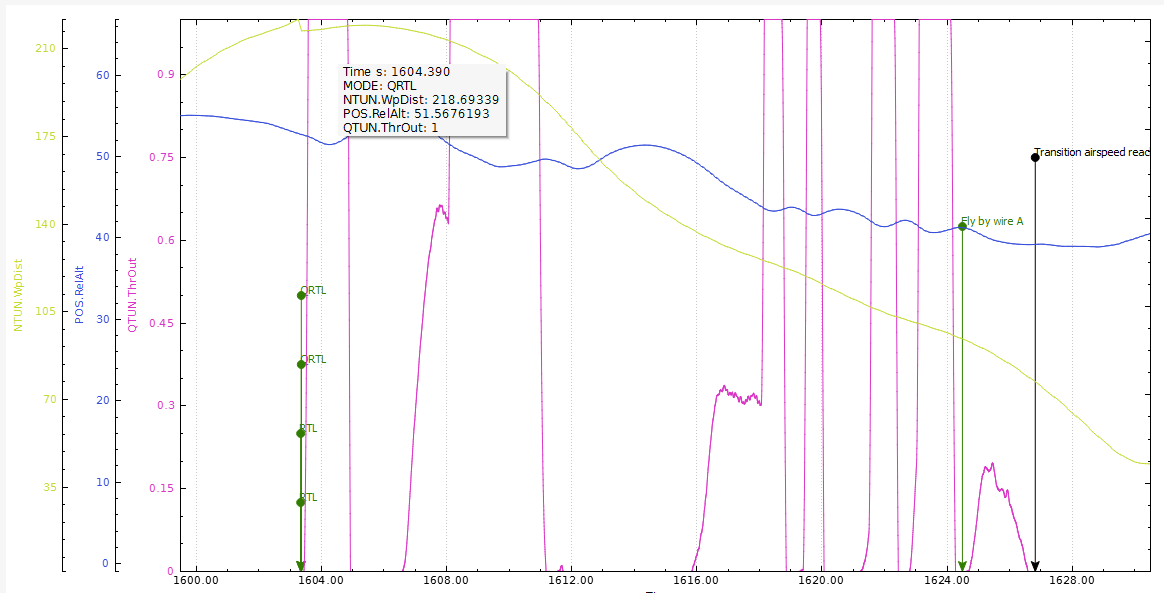
Flying a 3DR Aero based Quadplane around in FBWA at 55m and 218m from Home, I activated RTL mode (11). I expected the plane to remain in forward flight and navigate towards home until within 60m, then start a descent to 20m and transition into Q-flight. (Do I understand this correctly?)
However, the Qmotors instantly fired up and the plane appeared very confused about what it was supposed to be doing. Both the Qmotors and the pusher motor were surging. I switched back to FBWA to regain control and transitioned back to forward flight.
Looking at the logs I see that at the moment I switched to RTL Mode, there were 4 messages generated, 2 say RTL and 2 say QRTL. Is this a bug?
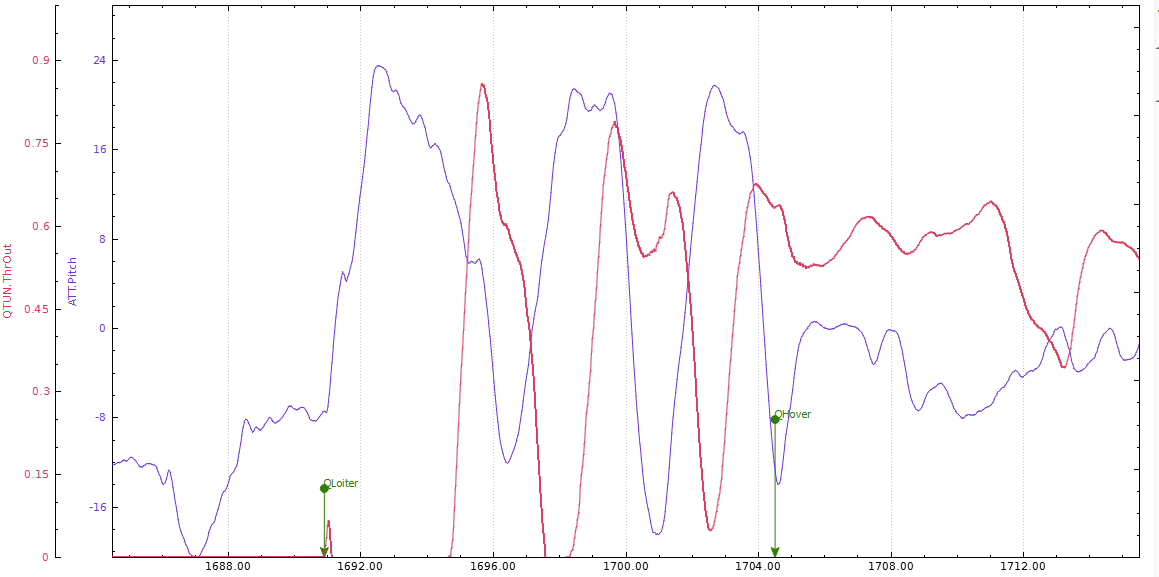
I’m also having trouble when I transition into QLOITER mode. The Qmotors are surging and the pitch is porpoising a lot. This isn’t just and abrupt transition as it tries to grab a GPS position, it is an oscillation. I must not have something tuned right. What’s strange is that when I takeoff in QHOVER and switch to QLOITER, or takeoff in directly in QLOITER, the plane loiters very nicely and appears well tuned.
The bad behavior in QLOITER is likely the same cause for the bad QRTL behavior in the previous post. Although its still a mystery why is went into QRTL right away, rather than RTL.
I have finally fixed this bug. It was a race condition between the RTL navigation code and the QRTL code. Leonard Hall and I found the bug while testing for the 3.8.0 release.
Sorry it took so long to find this!