I performed the on the ground tests this morning and they all worked as expected, switching from Q_stabilize to FBWA doesn’t cause the elevator to shoot in the wrong direction or oppositely correct. I even armed the vtol to see if each individual safety mechanism was working and at least on the ground they functioned properly. As I pitched the vtol the elevators as well as the quad motors were attempting to relevel the plane.
Yes you are correct, but I did reach out to the manufacturer to get the recommended plane PID settings as well as autothrottle parameters so it should at least fly at the bare minimum. If all else fails I will eventually take this thing up high and give it a shot manually.
I was definitely not aware of this, which param is causing this to happen? Is it just because my throttle stick is down during the flight? I assumed throttle nudge was only increasing the throttle if airspeed is too low and not forcing the plane into a dive.
I was experimenting with using an air flow sensor and an air speed sensor early on never bothered to remove the setting completely so I just disabled them. If that can affect it’s flight characteristics I can wipe the settings completely.
I understand what you mean, honestly I was trying my best to figure this out on my own but at some point I had to give up and ask for help. Especially when it looks like everyone else can do this without issue and I continue to make expensive mistakes.
I appreciate the clarity nonetheless!
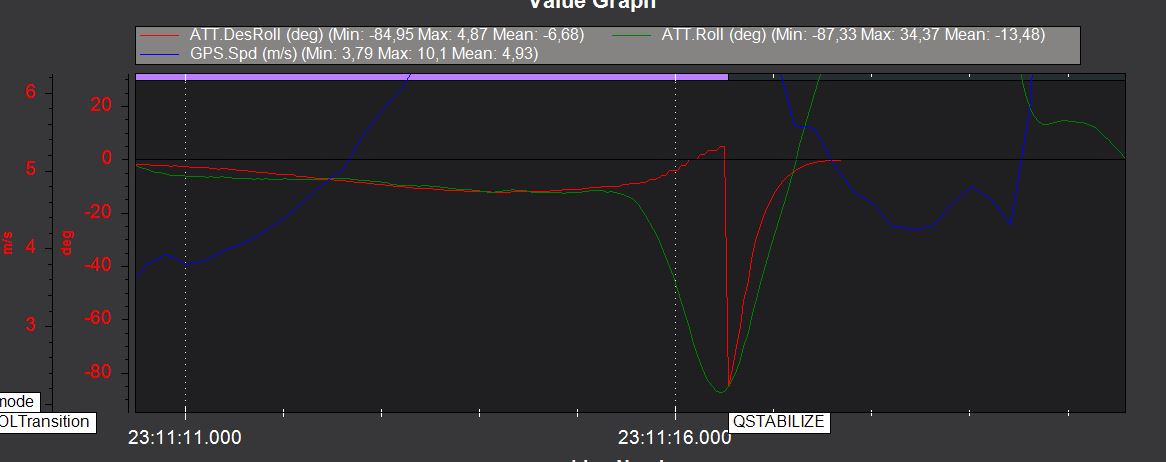
You’re correct the speed does technically increase but if you look at the video to accompany that log file the entire aircraft is yawing a full 360 degrees while it picks up speed. But by the end it is facing forward so maybe the ailerons could have helped save it before it dropped.
Ok I took your advice and double checked the roll and pitch reaction of the plane in FBWA. I still believe the problem lies elsewhere but I can’t rule anything out, I’ve attached a video bellow.
You mentioned that the throttle was set to zero during the automatic flights, do you know how I can fix that?
The direction fits. I recommend next hovering in QStabilize, then switching to QHover (whith throttle stick in middle position, the aircraft should hold altitude automatically) and hovering back and forth a bit. If that works without problems, repeat with QLoiter. With all sticks in the middle, the VTOL should stay in place in windy conditions. If that works, mentally prepare for your first fixed-wing flight. Flying fixed-wing in FBWA is no more difficult than flying a copter or driving a car. Start in Qhover, switch to FBWA and after hopefully successful tranistion you fly back and forth, possibly following a traffic pattern. If anything doesn’t work right, switch back to QHover. If the aircraft reacts too softly to stick inputs, execute Autoune. If all this works without problems, check the autothrottle function by testing FBWB or CRUISE. With this sequence you check the functions step by step and make it easier to identify malfunctions.
I am using Loong VTOL, an RTF version which had tested before delivery. There is absolutely no issue, just need some minor fine tuning of the PID and L1 controller to my liking.
I agree with Rolf that you should test QStabilize > QHover > QLoiter >. For forward flight may be you can use FBWB or Cruise. I feel that these two mode are the easiest to fly, you only need to control direction, others all auto. For testing the quadplane mode, you may set up the flight mode in the three position switch as below.
Top position : QStabilize
Middle position : QHover
Down position : QLoiter
Go out and test for these three mode. If you use the parameter from the manufacturer, (FoxT…), it should be fine. You should able to move the drone easily in QStabilize and QHover mode while in QLoiter, it should be stay in position in windy condition without any pilot input.
Assume that your drone is stable in QLoiter mode, now change the flight mode to:
Top position: QLoiter
Middle position: FBWB
Down position: RTL
Now go for transition test flight. With a fully charged battery, takeoff in QLoiter mode and ascend to a comfortable height, say about 80 to 100 meters. Then flip to FBWB, the drone should start to transition to forward flight, let it fly for a few seconds in straight and level, once the quad motor shut down, transition done and you can move around with aileron.
Assuming your Q_Option : 0 and Q_RTL_MODE: 1, in forward flight mode, should you lose orientation or whatever reason, just flip to RTL, the drone should fly back, transition to Quad mode and land by itself.
Worse scenario, it flip during transition, my personal suggestion is stay claim, wait until the drone is in upright position, I repeat, upright position, flip back to QLoiter, let the autopilot regain control and land safely.
It is very important to engage QLoiter mode in the right timing, i.e in upright position. The autopilot is not doing a good job in stall condition or upside down. You may simulate the situation in your mind and flipping the mode switch several time before your trail attempt.
Obviously this doesn’t solve your fundamental issue, flipping during transition but may offer you a safe way to test your drone before executing full auto flight.
For mission planning, you just need VTOL_TAKEOFF as the first command, the drone will takeoff in quadplane mode, ascent to set altitude, transition and climb to the second waypoint. Normally I add “LOITER_TO_ALT” as second command, about 200 meter, upwind to the home point, ascent to my mission altitude before proceed to the mission waypoint.
Personally, I feel a little unusual you buy an expensive composite quadplane for the fact that you do not even know how to pilot a fixed wing airplane. With current simulator such as Real Flight, you can almost learn all the skill in the computer, then buy a cheap foam plane such as Skysurfer and learn to fly. It will save you big money and time.
I did not go through your bin file, looking at your video, I think your quadplane tuning is quite poor as it has difficulty to maintain position. As for flipping action, it seems to me your CG is way off. It’s tail heavy. Obviously the elevator can not cause the flip since it is not even in forward flight and I think the quad motor may not strong enough either. Another indication is I think you say the quadmotor shutdown before the transition done, if the CG is correct, the plane should nose down instead of doing a somersault.
Hope this help.
Hey Keeyen, really appreciate the detailed response, I’ll try my best to address all the tips you have provided.
I purchased only the airframe from foxtech and all the electronics and wiring is my own.
I do a QStabilize > QLoiter > Qland test before each flight I have ever performed just to make sure there aren’t any problems with the gps or compasses. On that most recent flight the compass offsets for the pixhawks internal compass was pretty high which is why it was toilet bowling on the way up, it was also showing some compass errors. Definitely a bad call on my part. I do have a video of it flying with healthy compasses and it is tuned pretty well when everything is happy, holds position in wind.
Not only have I tired foxtech parameter files but I tried their custom firmware as well which produces the same results.
I understand the consensus is that I have to fly it manually to get more data so I’ll make sure to book a field asap. Whether it transitions or not though I’m not sure what changes I will make to resolve it’s current issue.
When I first started making vtols I started with a “small scale” which was a ranger 2400 I converted into a quad plane. it was plagued with issue both structurally and in the software but eventually I got it to work reliably and I have many videos and log files from that. I’ve flown that thing manually many times and crashed it as well but all it takes is a little foam glue and it’s back in the air, relatively low risk. I own real flight and I know how to fly fixedwing, I’m just not 100% comfortable with it, especially considering how much faster I would need to fly a large scale vtol as well as it’s much higher risk for pilot error.
My assumption was that I could take the software from the small scale, modify the necessary PIDs, gyro values and controller values and it should work just the same.
I want to discuss the CG thing a bit further since at the flight field this was everyone’s recommendation (this and that the motor is somehow mounted too low causing it to force the plane to flip). I balanced the cg in the same position as in the image sent by Greg from the foxtech website so it should be correct. But let’s say that it wasn’t and it was very tail heavy, the quad motors would still be able to handle it just fine and hover to the desired altitude. As the transition progresses the quad motors should still have much more attitude authority than the control surfaces so it should in theory hold it level. My thinking is that it being tail heavy will only come into play once the quad motors attempt to shut down and the desired speed is reached.
Your control surfaces are correct, so even if you were to stop the Quadmotors the vehicle should drop nose down and gain airspeed. If its not doing that then either the CG is wrong the as you suggested it could also be the motor thrust line. If its still snowy you could remove the landing gear and do some gliding tests by hand launching. The more exciting method would be to go very high and switch into manual mode, this will disable the quad-motors and all stabilization and show the underlying stability of the airframe in forward flight.
I’m sure fairly sure this is not a code or config issue, if the code was confused by compass, or anything else it would not be hovering in Qmodes.
It is very hard to diagnose such issues remotely from logs.
I feel like it would drop nose down if I cut the motors since it was balanced just slightly nose heavy according to the cg location from their website. I’m going to reach out and double check with them again just to be safe. I’m not sure if hand launching would be an option, this thing is pushing 10kg so switching into manual at a high altitude is most likely the way to go, I agree that it’s much more exciting.
With the CG off won’t the quad motors still balance it throughout transition, because the motors did not shut down? When comparing this video with the video of the other airframe witch yaws during transition it leads me to believe that there’s more too it than just a balancing issue. Also the loss in altitude right at the beginning doesn’t seem right either.
I agree that digging through the logs of these flights aren’t giving me much intel either, it’s pretty frustrating to be honest.
It may be silly but just to confirm, have you tested your forward motor actually push the drone forward? Using pusher propeller and install it correctly? If for some reason the thrust is reversed, this may cause the flip. Quadmotor want to move forward but the rear motor pull the drone backward.
I really can’t think of any mistake you can do to make it flip. Even the default parameter can do a transition well. I am very sure that the control surface, i.e the V tail can not flip the drone. It just does not had the required surface and sufficient airflow to make it happen.
Since you actually can fly a fixed wing, then I’ll suggest you can try to take off in QHover mode and ascent to say 200 meter the flip to FBWA or B and see if it can make the transition. Two things may happen:
Yes, transition done, just fly around and switch to QHover and see if it transition to quadplane nicely. Using QHover instead of QLoiter will avoid the abrupt stop when switching from FBWA to QLoiter which may stress the airframe.
No, it flip again. Stay calm, you are 200 meter high and have plenty of time to recover. Reduce throttle to idle. If your CG is set as slightly nose heavy, then it may flip once or twice and eventually should heading nose down to regain airspeed. At this point you can flip to QHover and let the quadmotor stabilize the drone and land.
Hello, i have this UAV, RTF from Foxtech, i am having a similar issue with transition, but it is when it is finishing an auto mission, when it transition to quad, it gets out of control for a few seconds, and then stabilizes, after reading all the comments above, i will check the CG and then i will come back, as no aparent electronic or mecanical failure shown.
Maybe the battery moves forward when it changes to quad, because it stops very hard from plane to quad, and then is the problem.
Hi everybody :
i have a babyshark VTOL UAV , RTF from Foxtech , have done reset FC by mistake , and Lost all data , I need ( firmware & parameters ) ,
Any help is welcome, thanks in advance…
Yes, The parameters were all correct. Arduplane does not fully stabilize the plane during transition, almost immediately after the fixed wing propeller is at full throttle, stabilization is handed over to the control surfaces. The quad motors stay on just to maintain altitude, not attitude.
So the root cause of the problem was the fact that the manufacturers supplied us with the wrong CG location, the platform was a new version at the time without backwards swept wings and they still had the old CG specifications in the description. I reached out to them to confirm and they sent me the updated version, after perfectly balancing it at the correct cg location it transitions perfectly.
This means the transitions are very sensitive to external factors but it is working for now.