Hello everyone,
With the most recent version of ArduPlane and Mission Planner, I cannot perform a VTOL takeoff when running sim_vehicle.py for quadplane (sim_vehicle.py -j4 –f quadplane -L KSFO --console --map). I followed the instructions in the main page and couldn’t find the problem by myself. You can find both the parameter and the mission files below.
The procedure I followed is:
- Open cygwin terminal, run cd ardupilot/ArduPlane
- run sim_vehicle.py -j4 –f quadplane -L KSFO --console --map
- Open Mission Planner and wait for automatic MAVlink connection
- Load the parameter file 4Hquadplane.param and click Write Params in the CONFIG/TUNNING tab
- Load the WP file KSFO_noTO.waypoints and click write WPs in FLIGHT PLAN tab
- Go to FLIGHT DATA tab and click Arm/Disarm
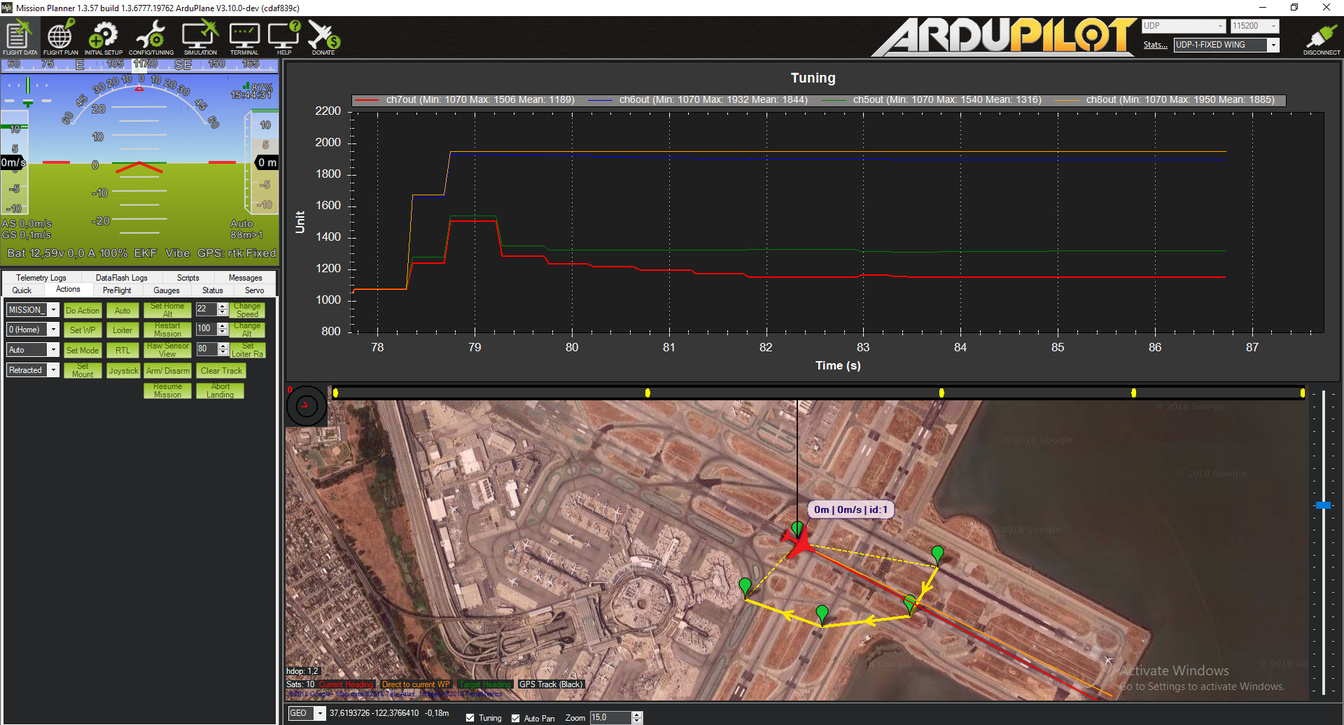
Now if i click Do Action with MISSION_START selected in the dropdown menu, the values of the 4 rotors change but the aircraft does not take-off, as you can see in the printscreen below. Restart Mission and Resume Mission also seem to have no effect. The only way to get it out of the ground is by changing the next waypoint to WP2 or WP3, for example, with Set WP.
Does anyone out there have any idea why this might be happening?
Thanks in advance,
Cheers,
Afonso
4Hquadplane.param (18.3 KB)
Contents of KSFO_noTO.waypoints:
QGC WPL 110
0 1 0 16 0 0 0 0 37.619373 -122.376640 5.250000 1
1 0 0 84 0.00000000 0.00000000 0.00000000 0.00000000 37.61901070 -122.37575010 20.000000 1
2 0 0 16 0.00000000 0.00000000 0.00000000 0.00000000 37.61816620 -122.36804010 35.000000 1
3 0 0 16 0.00000000 0.00000000 0.00000000 0.00000000 37.61581220 -122.36975670 100.000000 1
4 0 0 16 0.00000000 0.00000000 0.00000000 0.00000000 37.61528520 -122.37513180 100.000000 1
5 0 0 3000 3.00000000 0.00000000 0.00000000 0.00000000 37.61517480 -122.37518550 100.000000 1
6 0 0 19 10.00000000 0.00000000 0.00000000 0.00000000 37.61662800 -122.37985250 100.000000 1