Hello everybody!
So today I was trying out some QuadPlane simulations in Mission Planner. The mission is something like this: VTOL take-off to 120 meters, followed by a waypoint in Quad mode to align the vehicle for fixed-wing (FW) flight, then transition to FW, and finally execute a straight path (in xy, since z will change according to the terrain) to a height of 120m above the landing spot. All the waypoints altitudes are set to 120m, and defined with respect to “Terrain”. The takeoff point is ~300m above the landing point.
Now, when I run the mission, I see that everything goes as per the plan, until the fixed-wing flight starts. As soon as the fixed-wing flight starts, the altitude starts increasing and by the time the aircraft reaches the landing location, the altitude is almost 250m, as opposed to the desired value of 120m.
This can be verified by the logs as shown below:
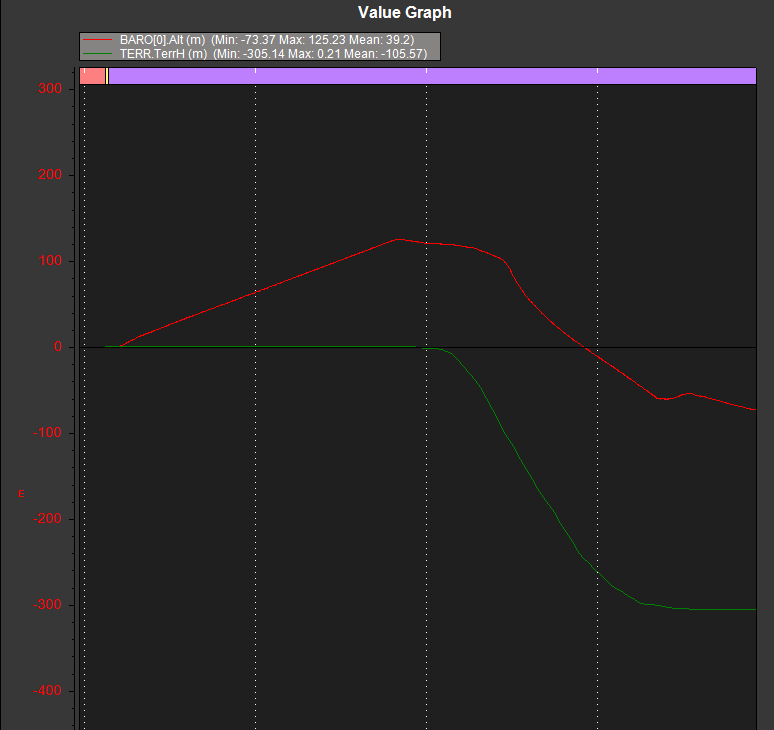
As can be seen, the separation between barometric height and the terrain height is increasing constantly, even after takeoff.
Why is this happening?
I am attaching the mission (.waypoints) file below here: https://drive.google.com/file/d/1_-i1Mr9cpf30vvBthSzO99xai8XHejto/view?usp=sharing