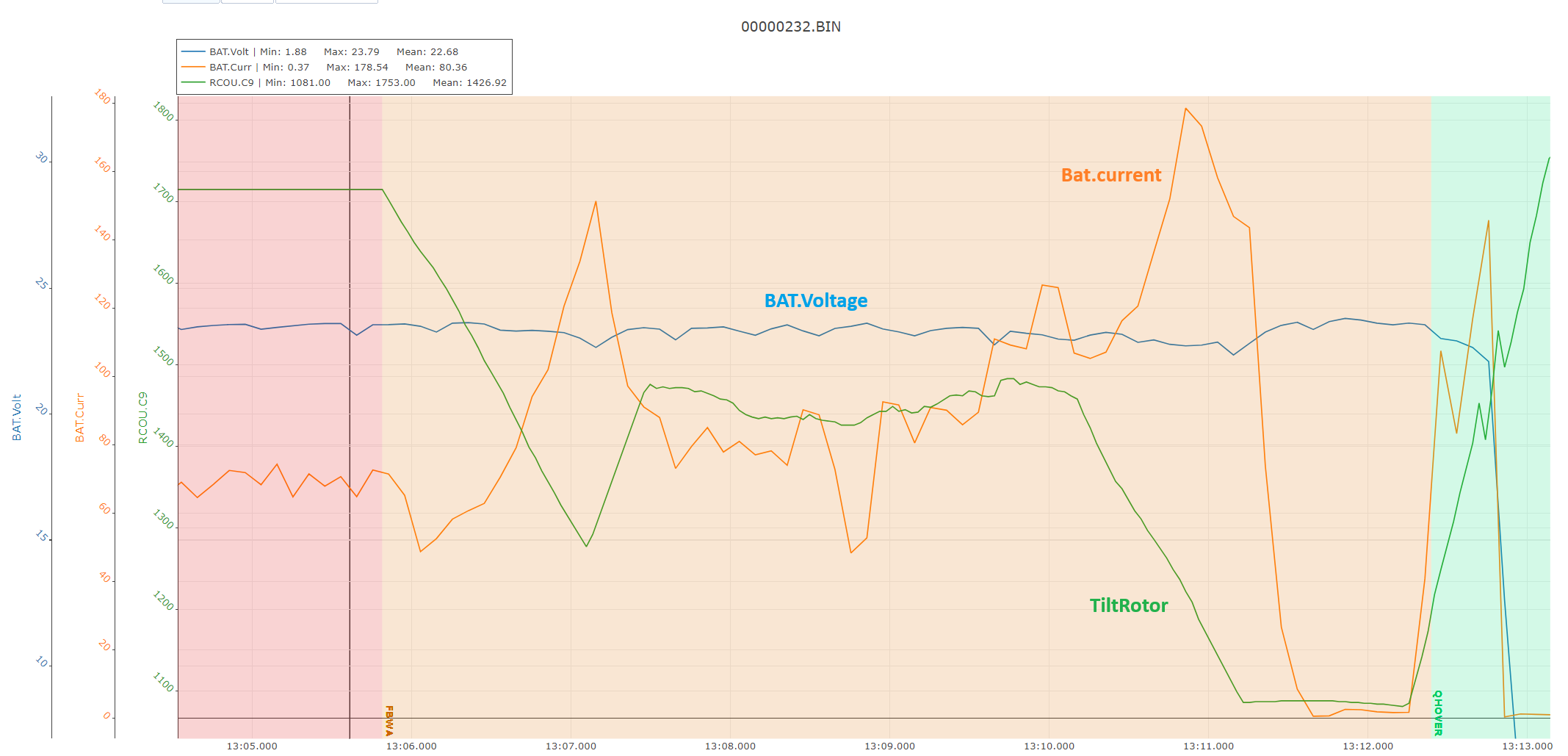
I’m using a QuadPlane with two front tilt rotors. During the flight, I initiated takeoff in Q_Loiter mode and then switched to FBWA. After the transition was completed, the plane suddenly descended and crashed. Upon reviewing the logs, I noticed that right after the transition, there was a peak in current up to 180 amps, which then suddenly dropped down to 1 amp. This behavior seemed very unusual.
QuadPlane Configuration:
Frame: Freeman 2100
Motors: DUALSKY XM5060EA-10
ESC: SUMMIT 100 Light
Props: 17 inch
Power Sensor: Mauch PL-200
Battery: 6s 22000mAh
I’ve attached the log file with a video for reference. Any insights or advice on what might have caused this would be greatly appreciated.
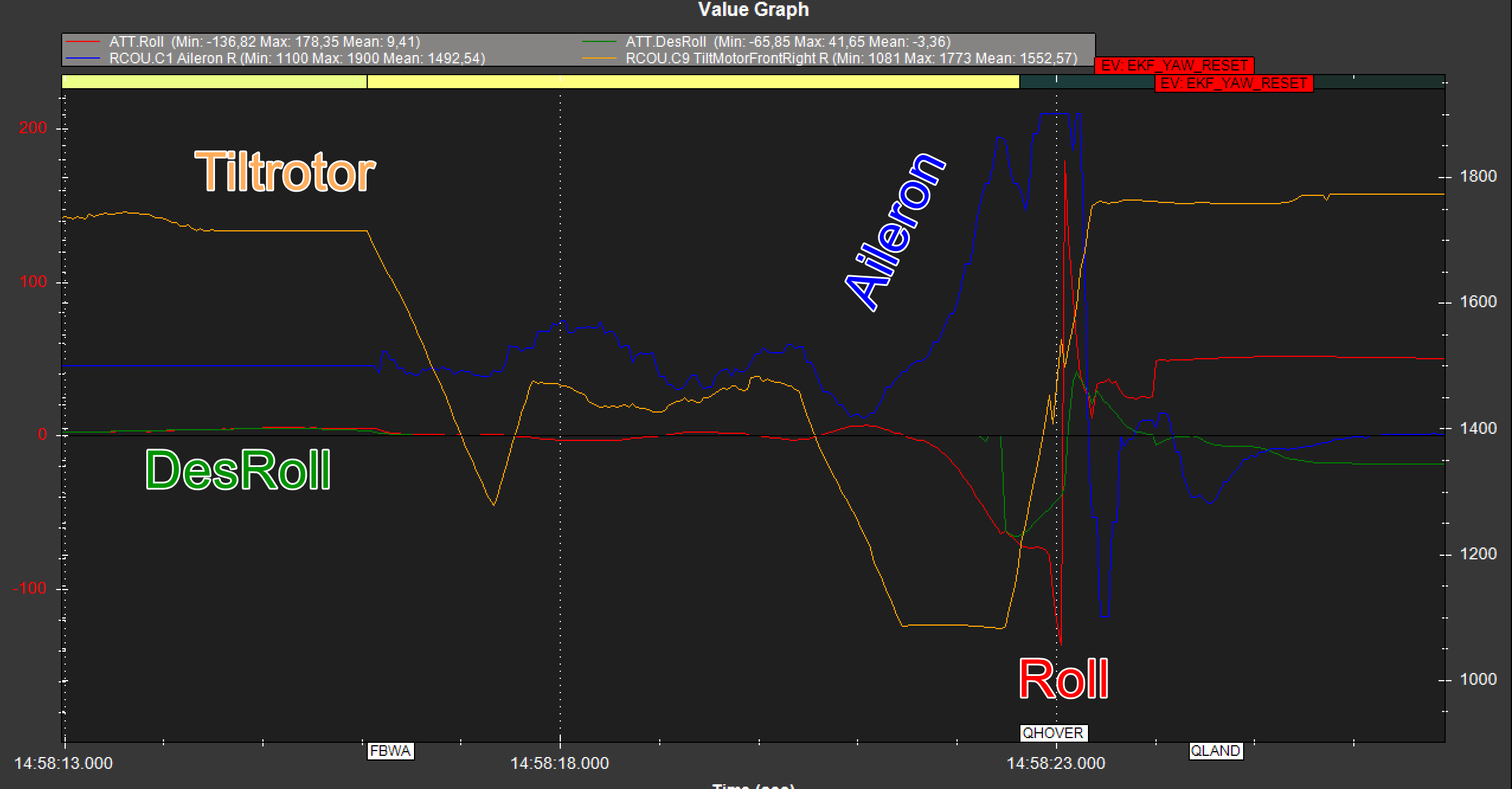
The ailerons have the wrong direction of action in FBWA. From the moment the front engines are tilted all the way forward, the rudder deflects the further the aircraft rolls. But in the wrong direction.
Do you have any explanation for why the battery current dropped all the way down to 1 amp immediately after the front rotors tilted fully forward? It’s puzzling because, even after the crash, all the electronic components (motors, ESCs, PDB, etc.) were tested and found to be fine—nothing was burnt. The battery is a 6s 22000mAh 25C, and the max current peaked at 180 amps just before dropping to 1 amp.
I hope that all the electronics have remained intact. Why wouldn’t they? The cause is a faulty parameterization (double-reversing inputs and outputs on Ailerons) and not an electronic failure.
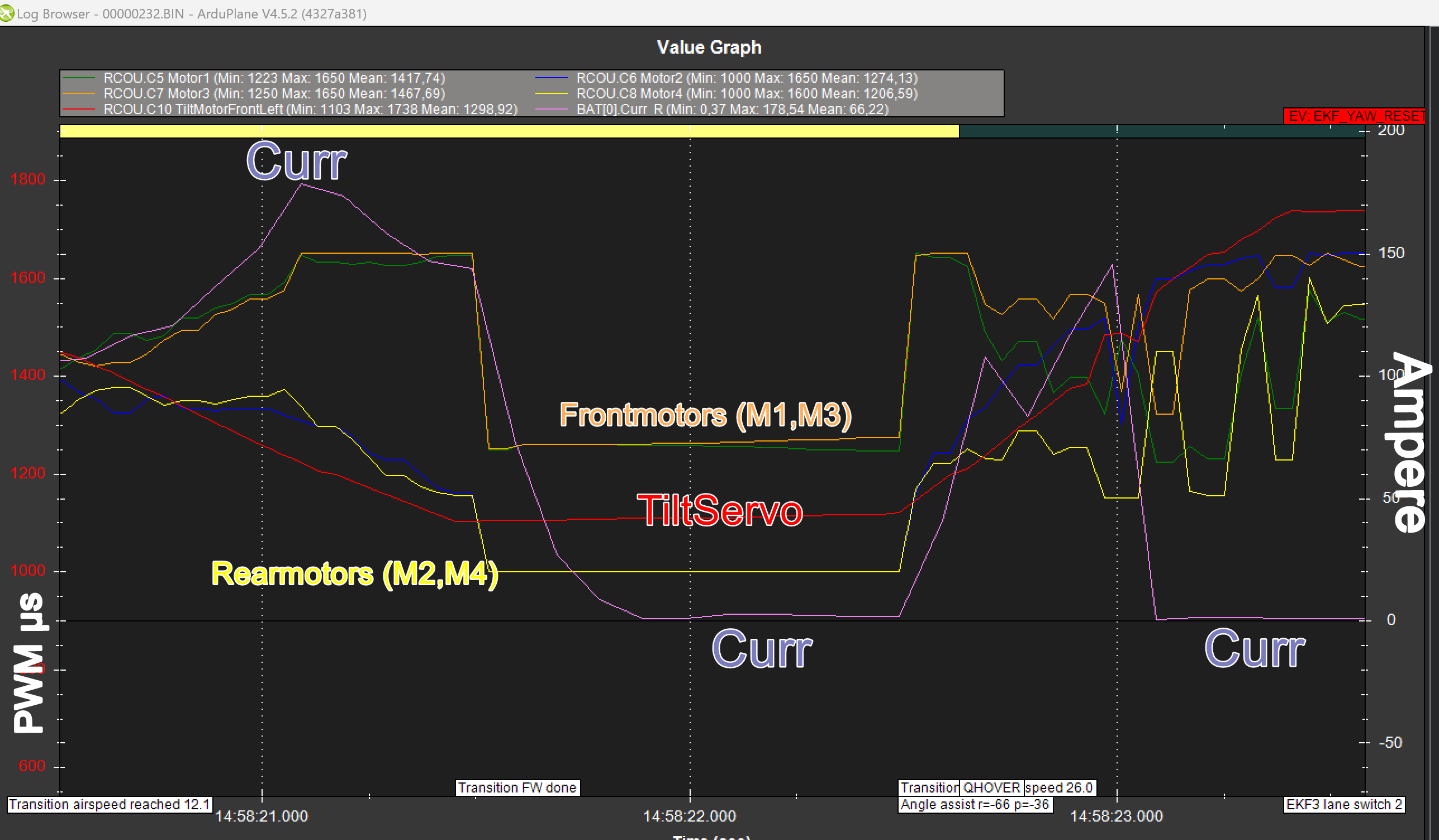
After the end of the transition, the rear motors are switched off and only the front motors run with 1300 µs PWM. The current consumption is of course much lower, but I also doubt whether the 1 ampere is correct. It is possible that your ESCs are feeding in current when they run on, which could explain such a low consumption. Unfortunately, we don’t have an RPM measurement. The subsequent increase is due to Q_ASSIST (Angel Assist) engaging and the quad motors all running up.
Before the next launch, you should carefully check the direction of action of the Ailerons and Elavator according to the WIKI, both from the transmitter and in FBWA mode without stickmovements only by changing the attitude.