Hello, I am new to Ardupilot and using ArduPlane 4.3.4 on my quadplane. After approximately 5 minutes of hovering tests, EKF3 lane switched 2 and the quadplane fell directly from 15 meters altitude. Before it fell, the motors sounded like they had been shut down and then powered up. I couldn’t see any wiring problem on the plane but the esc was so hot that i even couldn’t touch it. Could someone help me to explain the reason of that error? The log file is attached.
https://drive.google.com/file/d/1gjqGNcpsMVOShVqDMQLU_jCZuCUgFFWp/view?usp=sharing
My guess is that one or more ESCs failed before the lane switch occurred.
Your throttle input at hover appears to be near maximum, so you might be overloading the power system.
I don’t see battery voltage/current messages in the log… have you measured the motor currents at hover?
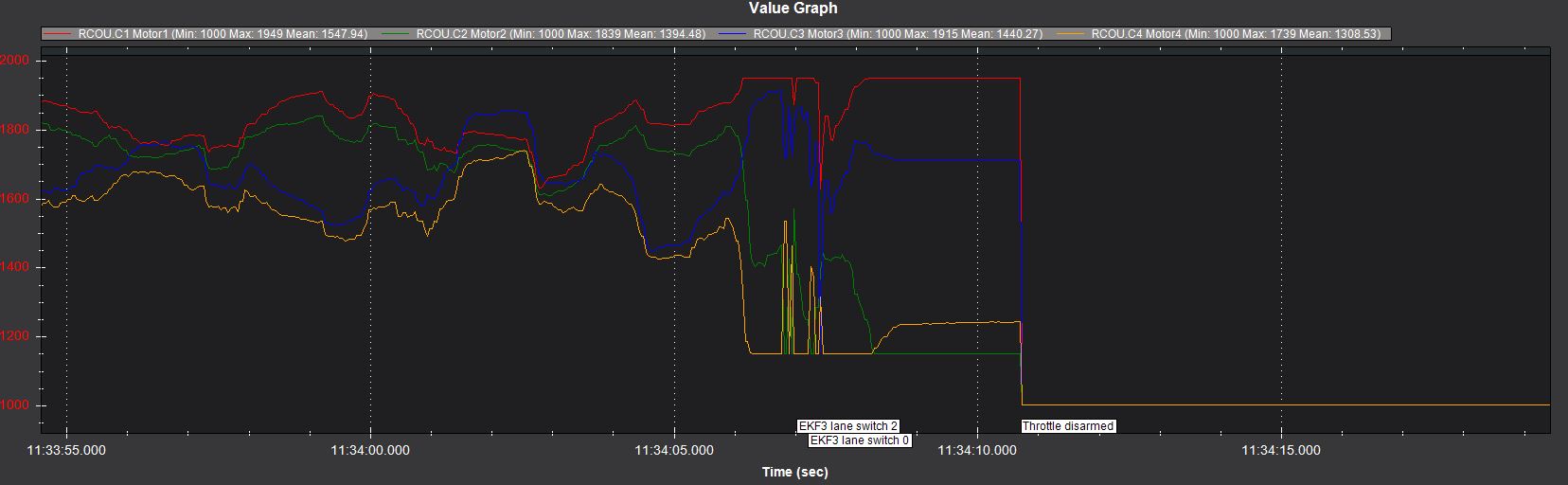
Yea, it seem clear there was thrust loss on Motor 1. 2&4 drop to attempt stabilization and down it goes from overall lack of thrust.
No, I didn’t measure motor current but the motors are F60 Pro and also the 4 in 1 ESC is T-Motor Pacer P60A. I don’t have an idea about why there is no battery voltage/current message in the log.
What might cause the problem? I used Y cable instead of power distribution module and the cable lenght is approximately 50-60 cm to motors from ESC. Does these cause thrust loss? I also uploaded the crash video into the link. Could you view it?
(The flight isn’t clear due to PID)
https://drive.google.com/file/d/1W5u4kMhrIOaajXipvPPNe_nmxJZrKorP/view?usp=sharing
Hard to say. Could be an ESC, Motor or broken prop.