Hello Everyone!
Please help me with the cause of this crash.
the bin file is attached below
@tridge
@GregCovey
https://drive.google.com/drive/folders/16CzcRua5ECHhLhYJSb2Honbac_8BVrzx?usp=sharing
At first glance, it looks like your VTOL motor/prop/esc #1 (front right) failed to produce thrust way before the UAV achieved sufficient speed for fixed-wing flight.:
Also: unfortunately, you do not log current, but the huge voltage drop around the time thrust-production on RCOUT.C1 failed indicates that something went very wrong, I would guess an extremely overheated motor or ESC burnout …
Or simply too windy?
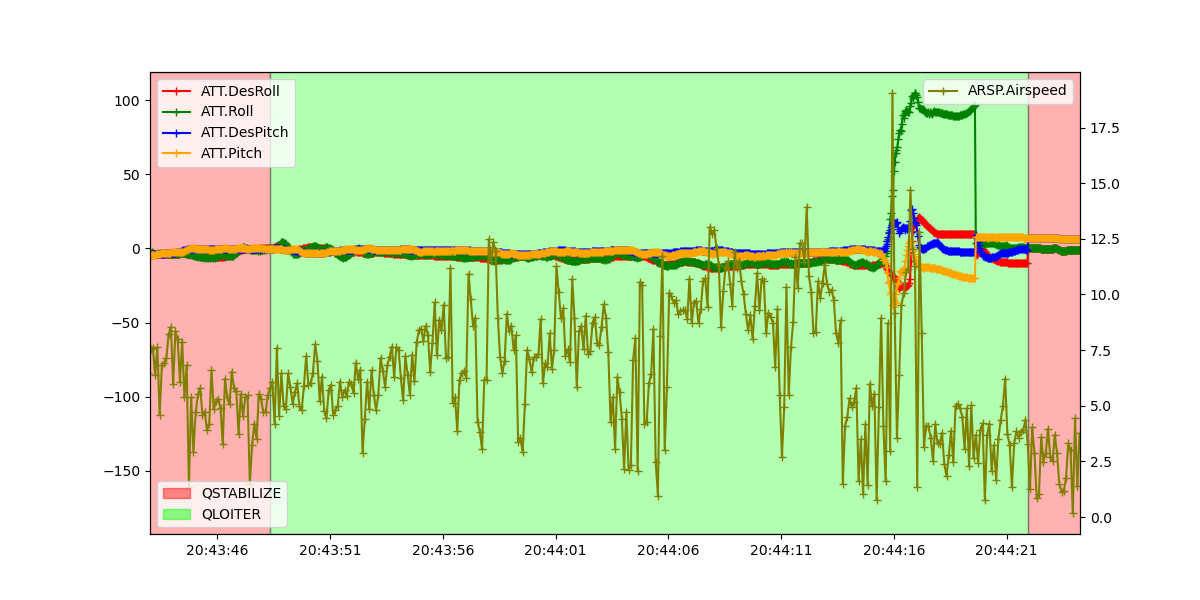
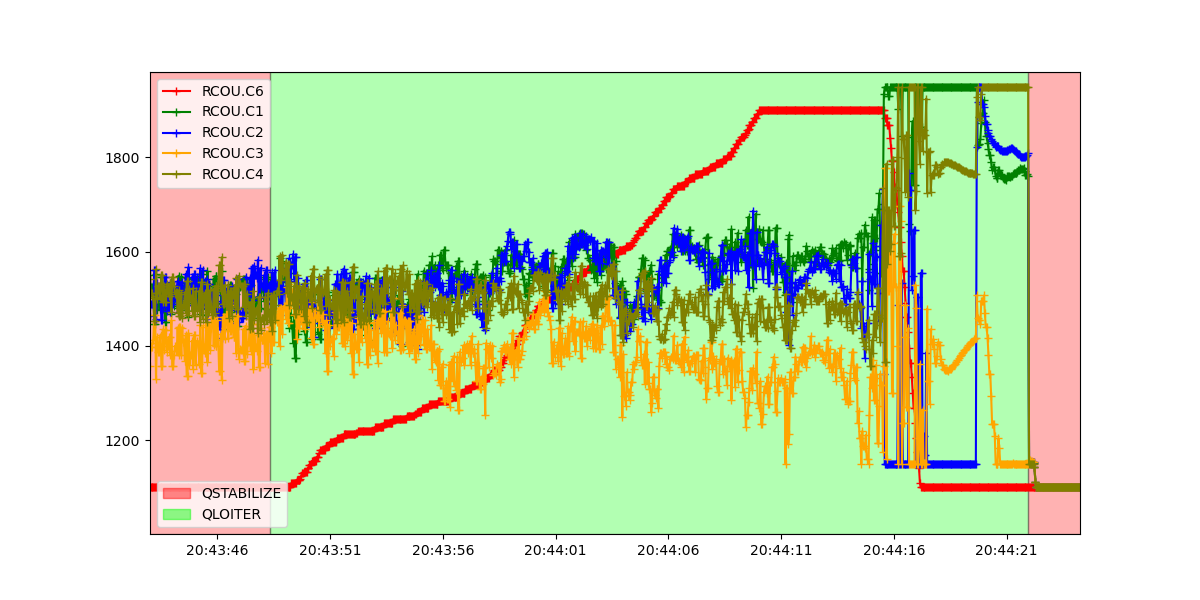
Thrust motor went to full high before crash starts, quad motor C1, C3 was saturated
While plane aileron, V-tails are not moving till crash.
This is a custom made model
@Andre-K Thanks for your reply. We are just testing this model in a Quad mode, we haven’t made any connection for the Plane
When we switched the Quadplane into the Qloiter mode, for around 30-40 sec it was flying well and suddenly the crash(FLIP) happened and C1 and C4 reached their maximum because of the flip and because of the full PWM value voltage sag happened.
@akhil to me, it looked like RCOU.C6 was connected to the pusher, but I did not see an attempt to transition, - but C6 does ramp up… so I was no-so-sure about that ![]()
Did you have a significant crosswind?
yes, the ESC for the Pusher motor was connected but the motor wires were not connected.
I think I have provided the VFD_GAIN so that the Pusher motor was trying to help in the Position lock. The crosswind was there but not that much (Around 3-4 m/sec)
@akhil - yes, I see now that the voltage drop is a result of the high throttle demand, rather than a fault.
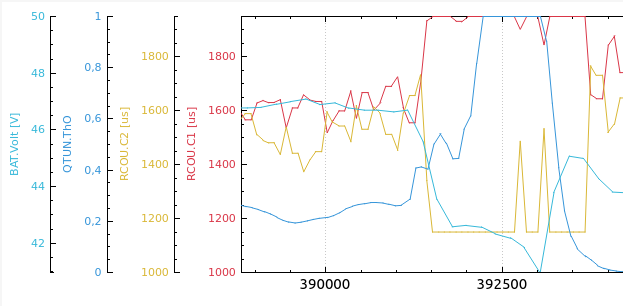
but why it has happened. Suddenly the rise of throttle demand.
@akhil
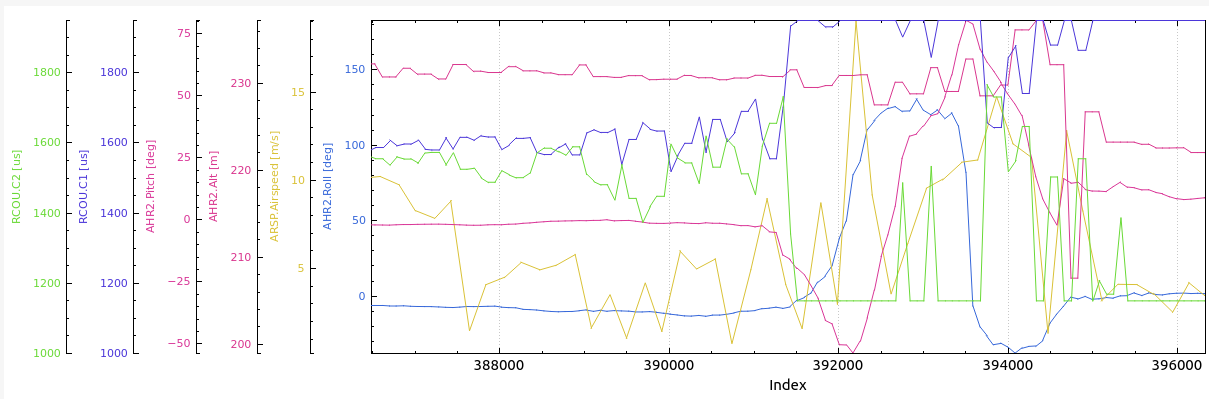
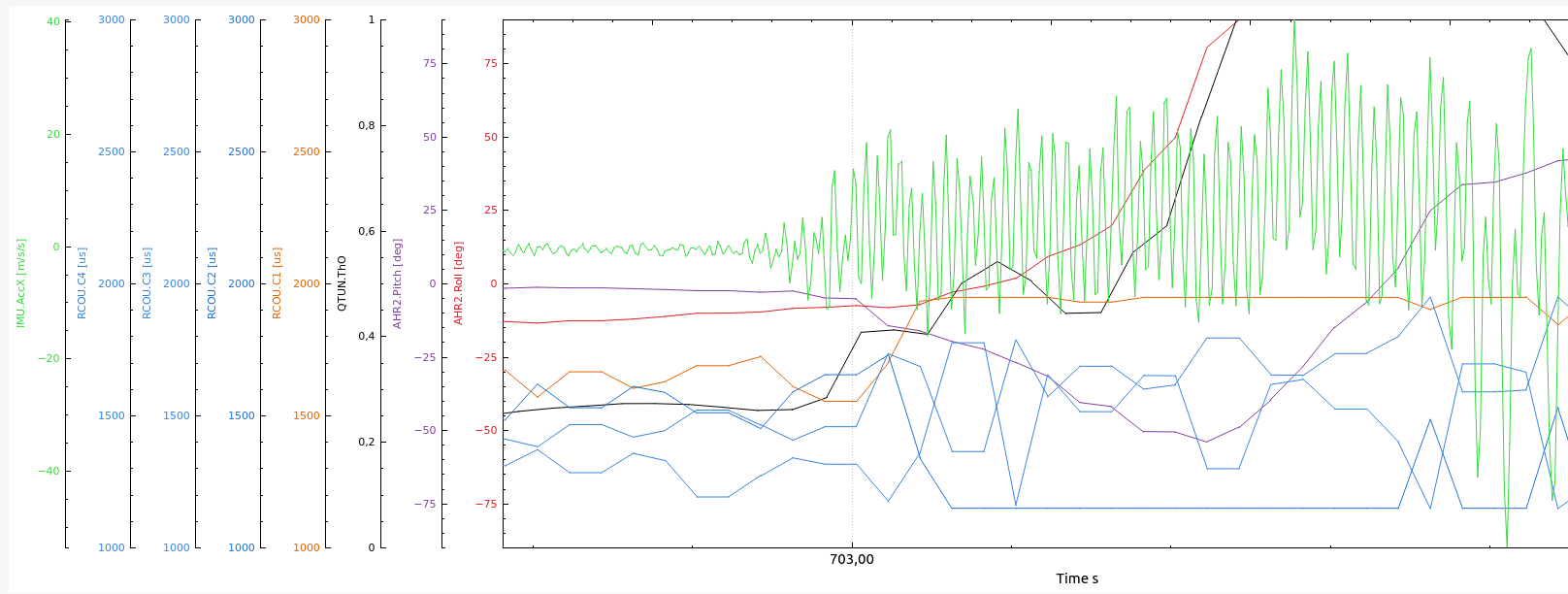
The deviation is roll(red) right ( positive values), pitch(purple) down(negative values)
it starts at about 703 seconds
you can at the same time see the AP command motor 1 (right front corner) ramping up to full power, and is still unable to reduce the pitch and roll rate.
hence: my conclusion is that motor1 failed to provide thrust (be it ESC/wiring/prop/motor)
I can narrow it down: looking at the increased vibrations, - this may be a possible propeller disintegration, or propeller fault CF prop broken and goes floppy, or half of a folding prop falls of.
Additional information: your front motor are working harder that the rear motors, if the plane is at it’s designed CG, you may want to move the quad-motors forward.
As to why CTUN.Tho keeps increasing, I guess is simply the throttle demand for lift, unable to be fulfilled due to the priority of stabilization, the demand is ramped up, but not the motors, but maybe @rmackay9 can explain better.
what are the precautions can I take before another flight?
Check wires, both power and PWM to ESC to motor - check propellers for damage. if folding, check the hub - use an anaerobic retainer to make sure screws don’t loosen. Check whatever the ESC/motor combo is prone to desync - (which I doubt happened here)