Yesterday I went to maiden my Quadplane, a MFE Hero equipped with a Pixhawk 6C. I had previously flown it in QHOVER and QLOITER as well as conducted QAUTOTUNE. This was my first attempt at an auto mission, and admittedly I did not attempt to fly in any of the FBW modes first.
Winds were strong yesterday, around 16kts gusting to 23 so I was concerned but was running out of time to get a test flight in.
I set a simple mission with VTOL Takeoff, Loiter (Time), RTL, and VTOL Land waypoints. The plane took off facing into the wind, began transition, and banked towards the next waypoint. At this point I believe it was starting a counter clockwise turn for the Loiter waypoint, but it went nose down and began losing altitude. I attempted to correct with input but it impacted the terrain.
I did note higher Z axis vibrations, not sure if that is a contributing factor but it definitely isnt helping.
Any insight would be greatly appreciated. It wouldn’t let me upload the log because it’s “too big” even though it is only 1.7MB, so I uploaded it to my Drive.
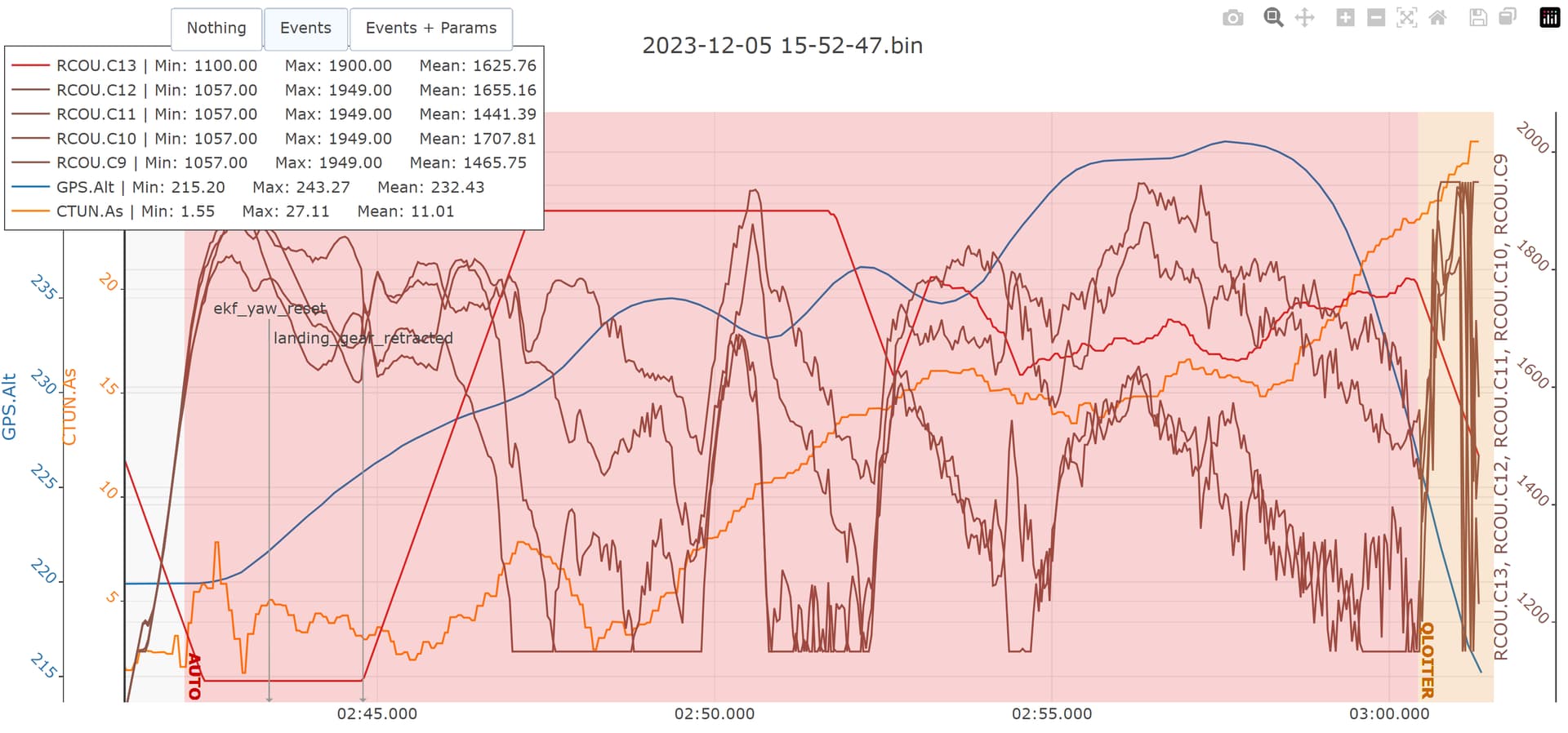
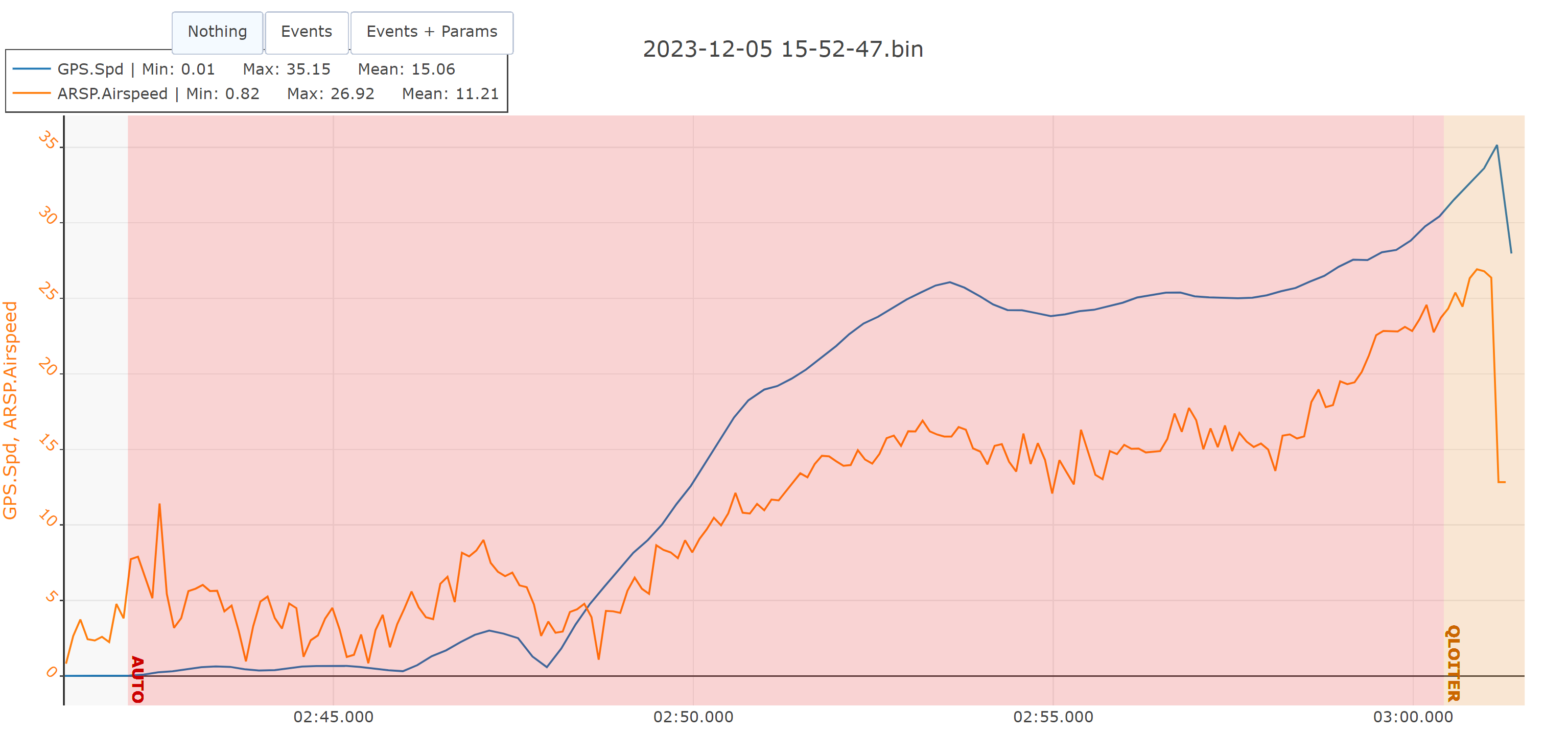
Something strange that stands out to me is that the quad motors (RCOU.C9-C12) never shut off after transition. This makes me think that Q_ASSIST was active the entire flight. The indicated airspeed seems to barely exceed Q_ASSIST_SPEED = 14m/s. The ground speed appears much higher than the indicated airspeed (second plot), which does not make sense if the aircraft was flying into the wind.
I cant say this is the cause of the crash, but there may be issues with the airspeed sensor causing some strange behavior with Q_ASSIST. Combined with the high winds, it may not have had adequate control.
I apologize, but I need to clarify, the when transition began the aircraft turned with the wind, so it did have a tailwind, which would explain the low IAS and why Q_ASSIST was still on. I do agree that in this scenario, it may not have had the speed to maintain lift, but I would have expected Q_ASSIST to help it at least hold altitude, unless my understanding of it is wrong (which could very well be the case)
Thank you for pointing this out, as I never even thought to check if the lift motors were still operating.