Hey guys,
I’m building a VTOL plane (quadplane) with an X type multirotor and two elevons delta wing configuration with a pusher motor.
The frame is quite sturdy with minimal vibrations and there’s no apparent issue with the on-board electronics. I have already taken multiple successful hover tests with the frame.
However, when I took the quadplane for a flight involving a transition to cruise mode, I suffered a crash resulting in considerable damage to the airframe.
The mission was planned as follows:
- Manual hover to 15 metres height in Q_Loiter
- Switch to Auto mode
- Auto hover to 30 metres height
- Complete a small circular flight plan and get back to the home location
What actually happened:
- Hover to 15 metres in Q_Loiter was smooth
- The quad plane switched to Auto mode
- Auto hover to 30 metres height was successful
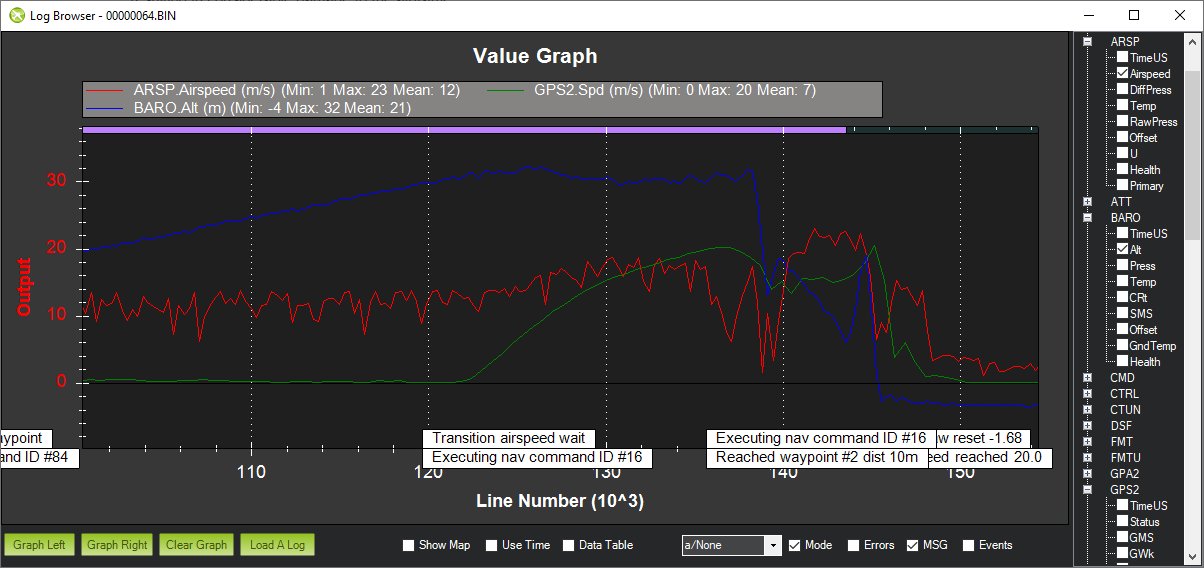
- During the transition, the quad plane flew straight for about 20 metres, following which it failed to maintain altitude, took a hard right roll, spiraled and crashed, resulting in airframe damage.
I tried to take back the control by switching to Q_Loiter, but to no avail.
What I suspect here is that once the forward motor starts, the delta wing isn’t generating enough lift to support the weight of the quadplane. The airspeed sensor values are also a bit shaky, enough to confuse the autopilot in my opinion.
I’m attaching the log file of the flight for you humble lot to diagnose what the issue here is. Thanks in advance.