My second test of the Ranger EX QuadPlane had an added air speed sensor and an upgrade to APM Plane v3.8.0 beta 5. We took off in QSTABILIZE mode which worked perfectly into the 14mph breeze. The odd noise during initial takeoff was a passing motorcycle. Just after transitioning to FBWA mode, the plane wanted to pitch upward and loose control. I quickly recovered back in QSTABILZE mode and repeated the test. On the ground, I re-tested the control surface compensation and it was correct.
Back at home, a question from Cala had me looking at the Q_FRAME_CLASS and Q_FRAME_TYPE parameters. Apparently, the firmware upgrade changed my Q_FRAME_CLASS setting from 0 to 1 which means hexacopter not quadcopter. Without yet looking at the logs, this may have been my issue in FBWA mode.
Greg,
I upgraded from 3.71 to 3.8b6 and also see that Q_FRAME_CLASS changed from 0 to 1. I just did 2 long days of test flying with no issues like yours, so I think that change was intentional and you are experiencing another problem.
FWIW, I have used both analog and digital air speed sensors and actually prefer the analog. I find it more reliable and predicable as its not associated with I2C which is plagued with difficult to diagnose issues when we add more stuff on it. I only use the I2C bus for the mag compass. That said, I did order one of those new digital MS5525 airspeed sensors to try.
Ok, thanks for the update. I don’t like the Q_FRAME_CLASS set to 1 when the comment next to it says “1:Hexa” so I changed it back to 0 for my quadplane X setup. After re-booting the Pixhawk, it still reads 1 so I am not sure if it is a bug or if Mission Planner v1.3.48 hasn’t caught up to a change.
Here is my parameter file for the Ranger EX with v3.8.0 beta 5. Perhaps someone can spot something wrong.
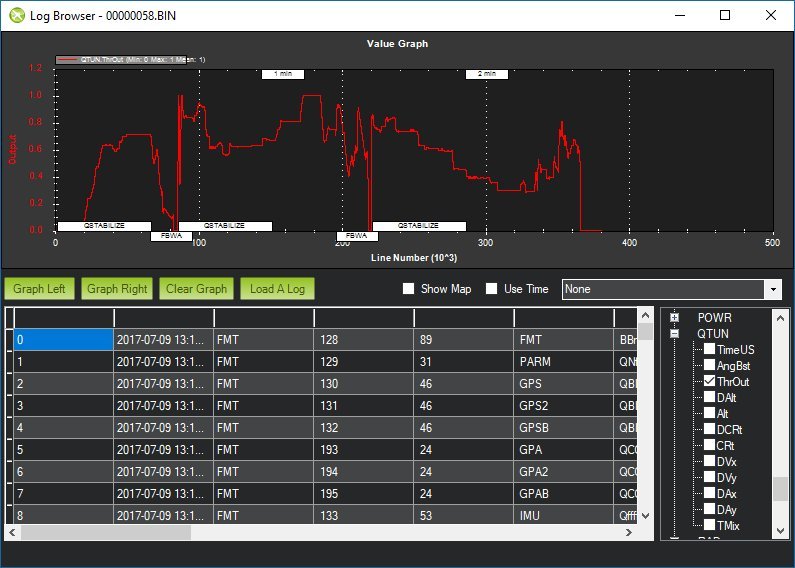
I’m not sure what I am looking for so I just made a few graphs of interest from my 14meg log.
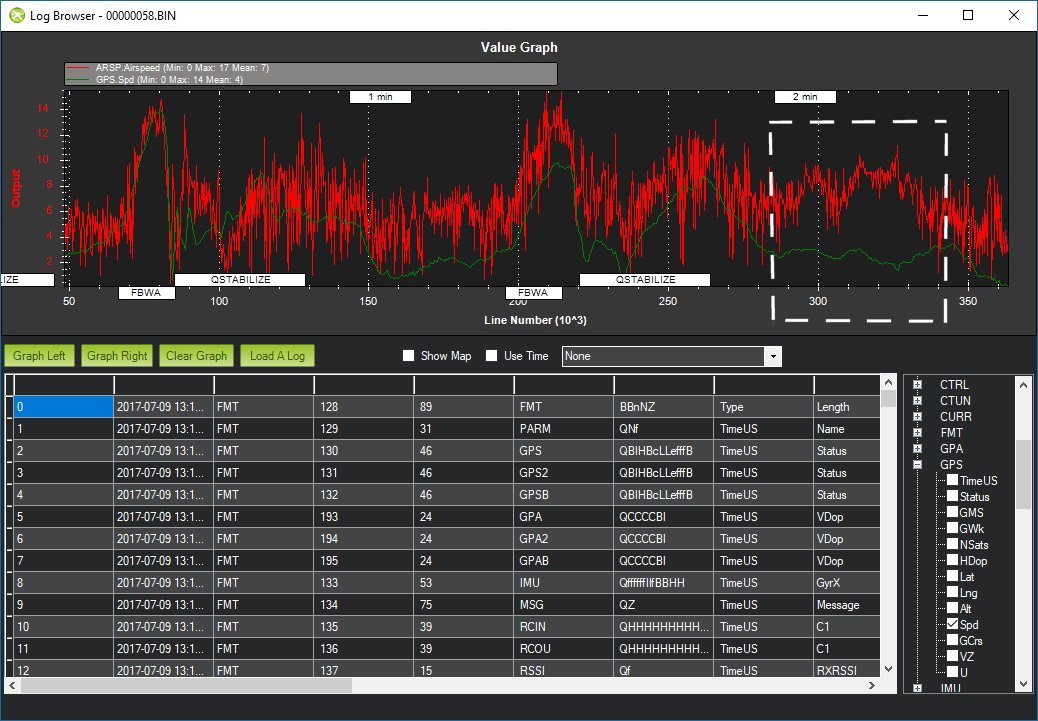
The first graph of air speed and GPS speed looks like my sensor is working. I made a dashed box around the end of the flight when I was descending against the wind and moving forward slightly. The air speed is definitely higher than my GPS (or ground) speed.
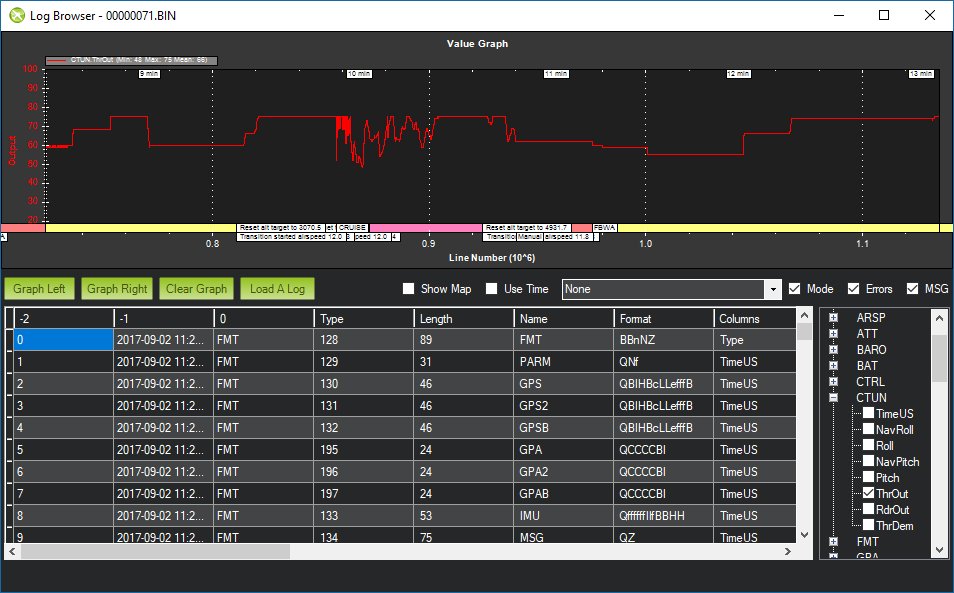
The third graph shows an alarming drop in ThrottleOut while in FBWA mode. I’m not sure if this why I transitioned back to QSTABILIZE or if it occurs when changing modes back to QSTABILIZE.
I checked and had frame class=0 in 3.7.1; I update to Beta and changed to 1 so is something firm related but looks like 1= quad I understand; is in concordance with copter 0=undefined 1= cuad http://ardupilot.org/copter/docs/parameters.html#frame-class
I can´t comment results because I couln´t move from the floor yet but follow your comments guys, thank´s
Yes, I try to show that is in concordance with copter firm; I think that it´s has sense that is similar with copter fw for what you mention that many of Us have different vehicles type; if for copter quad is =1 and for quadplane it´s =0 our mind going to explode LoL.; I think they are merging but better if devs can clarificate.
Sorry my bad english to explain.
I’m using Mission Planner v1.3.48. In the Full Parameter List, the description says “0 = Quad, 1 = Hexa” and so on. It may be possible that both Mission Planner and the Wiki are not updated yet.
Cala,
Your English is still better than any other language I try to speak.
At this point, if I don’t find a solution to my FBWA issue, I will likely revert back to v.3.6.0 and see if it still exists.
See screen shot attached from my mission planner. Odd we have different listed parameters. Although I’m using V3.8.0 beta 6. Perhaps that is the discrepancy.
Returning to this thread from the one in the above post. I have re-loaded v3.8.0 and reset to default parameters waiting to test transition from QSTABILIZE to FBWA mode. The main changes were to convert from X-frame to H-frame and use 60lb fishing line to anchor the booms. Details are in the issue thread above. My current .param file is below.
The flying field was too busy with people, RVs, and campers this weekend for experimental testing so I flew my Ranger with the normal wing set to gather logs and just hover tested my mini Talon. Since my stock Ranger power system requires 70% throttle on 4s to cruise around using FBWA and CRUISE modes, I decided to upgrade my motor and ESC, keeping the 10x6 prop and 4s8AH Lipo. The extra power will help when the heavier quad rotor wing is used which also adds drag.
I had several nice 15 minute flights which only used 50% of the 4s 8AH pack. Here is a graph of my ThrOut. You can see CRUISE mode working around the 10 minute mark but the whole flight centered around 60%-70% throttle.
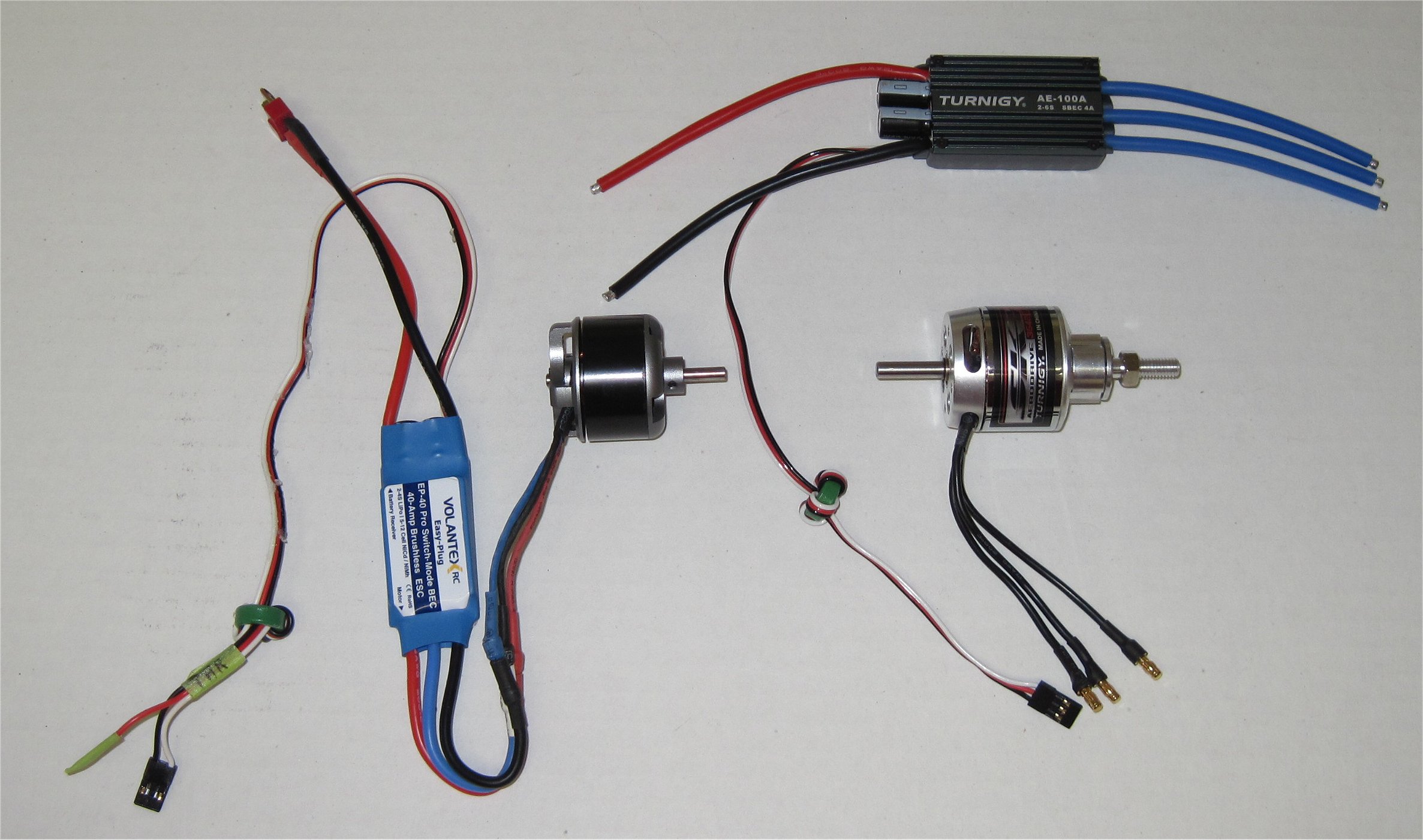
I’ll be using the Turnigy SK3 3542-1250kv motor with the same prop and battery but a heavy duty 60-100 amp ESC. This combination provides 746 watts at 51 amps using the same 10x6 prop.
For my new ESC, I choose this Turnigy AE-100A Brushless ESC because it was in stock at the US warehouse along with my SK3 motor. The 65A or 80A Turnigy AE Series ESCs would work just as well. This series ESC has a very capable 5v 4amp BEC.
Greg - an update on my Ranger…I installed fw version 3.8 and had 3 very successful flights last week. Transitions are butter smooth. I also did a round of autotune (first time since installing the quad components) and the gains did change somewhat from their previous settings. The weather vane function and forward motor assist works really well in QLoiter mode.
Good to see you’ve upgraded the motor. I also have a Turnigy 3542 although mine is 1000KV and I’m swinging an 11 x 5.5.
Thanks for the update! I am glad your Ranger is working well now. I have never considered an Autotune on a QuadPlane so I might look into it. Does your setup with v3.8 use an H-frame? I hope to test my Ranger this weekend.
My power system upgrade arrived today. Hopefully, I can get it installed and test it this weekend. The plan would be to first test it as a normal plane using v3.8.0 firmware, and then swap the QuadPlane wings on for a Hover/Transition test.
The Turnigy SK3 motors are good quality and full throttle will rarely be used…maybe on a normal plane take-off. With the 10" prop, full throttle is only 51amps so my Turnigy AE-100A ESC is overkill. It was in stock in the US warehouse along with the motor so I got it. The goal is to reduce my throttle setting from 60%-70% when flying as a normal plane so that I had more power available when adding the extra weight and drag of the QuadPlane wing.
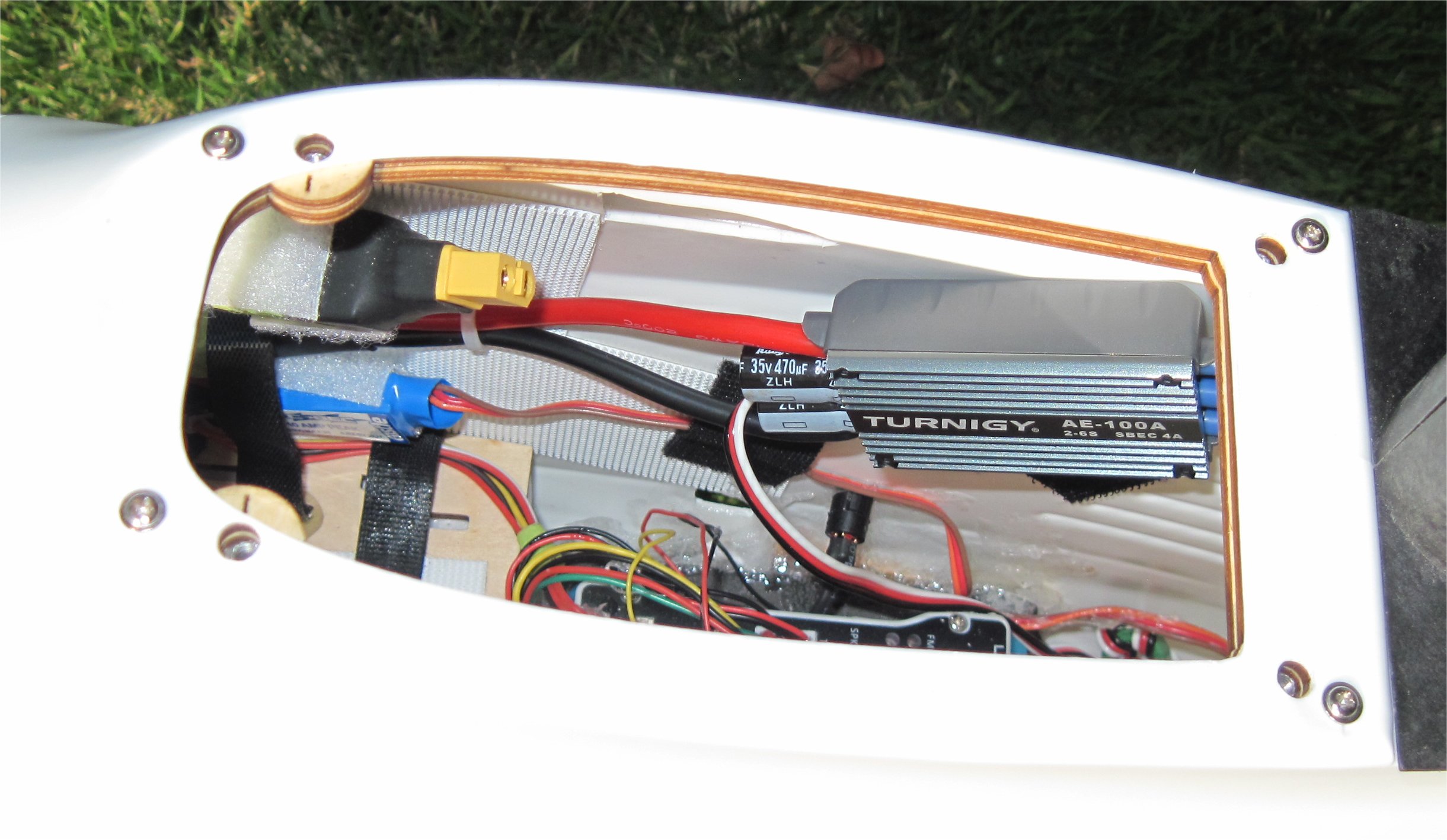
The new power system installed easily. I used the same upthrust as before by placing nylon prop hub washers on the lower two screws. I like that the prop is held more securely by a washer and nut instead of the stock adapter. I taxied around in my backyard to test it out. Everything seems to work great so I’m ready to test both normal wing flying for the new ThrOut setting and then the Quad wing for transition using v3.8.0. It looks good for this weekend…

 but follow your comments guys, thank´s
but follow your comments guys, thank´s