I have a quadplane that is taking off very aggressively during AUTO takeoffs, but is fine at all times with Q_LOITER and Q_HOVER. It is also completely fine at all other times during AUTO flights – only takeoff is bad. I’ve been digging through the parameter lists and tuning guides, but am not figuring this one out.
14 foot span, 16kg GTOW, Cube orange, 4.2.1
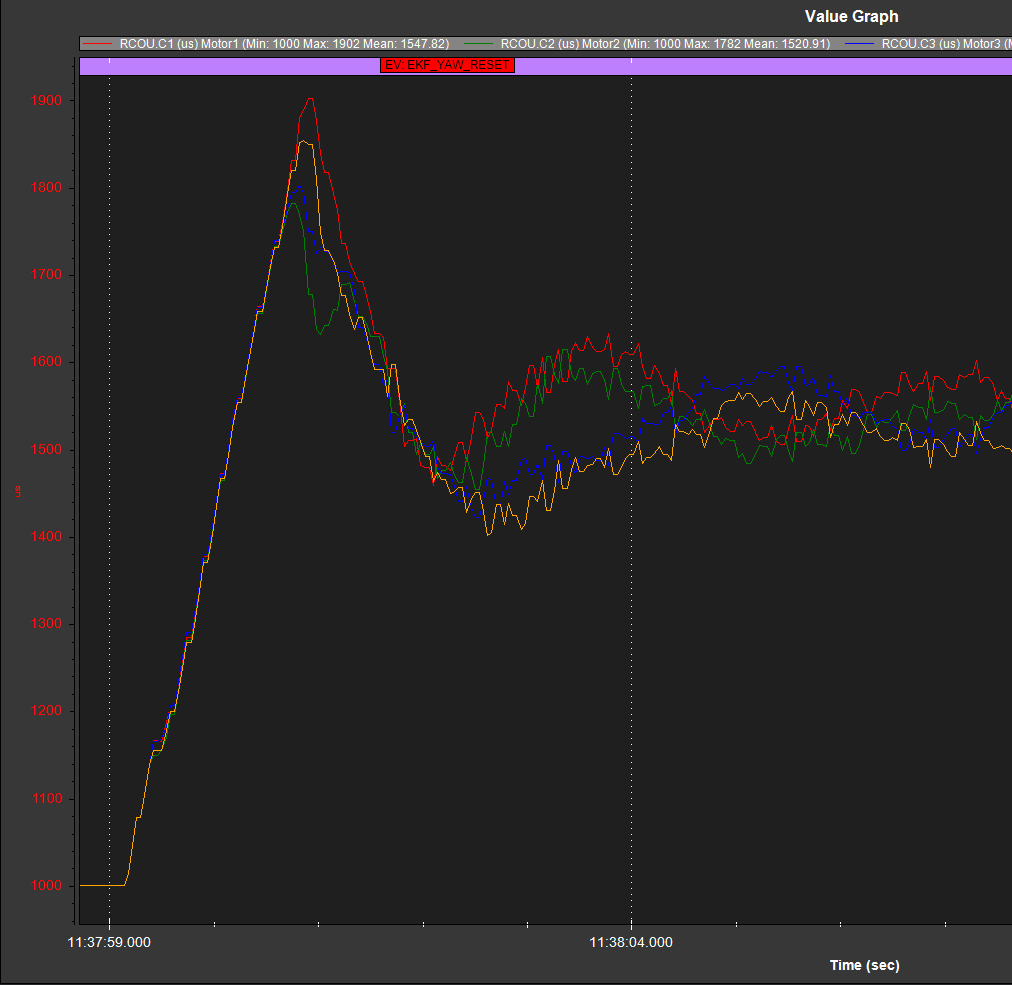
It uses almost 100% throttle for the initial liftoff and then stabilizes at a PWM of 1550 (range is 1100-1950). Control appears to be good … but it is quite aggressive at just over 2g of vertical acceleration.
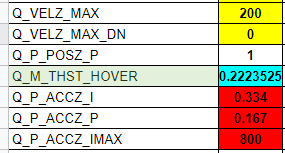
I’ve attached a few of the parameters as well as a plot of PWM output at liftoff/climb.
Anybody have any ideas?
Thanks!