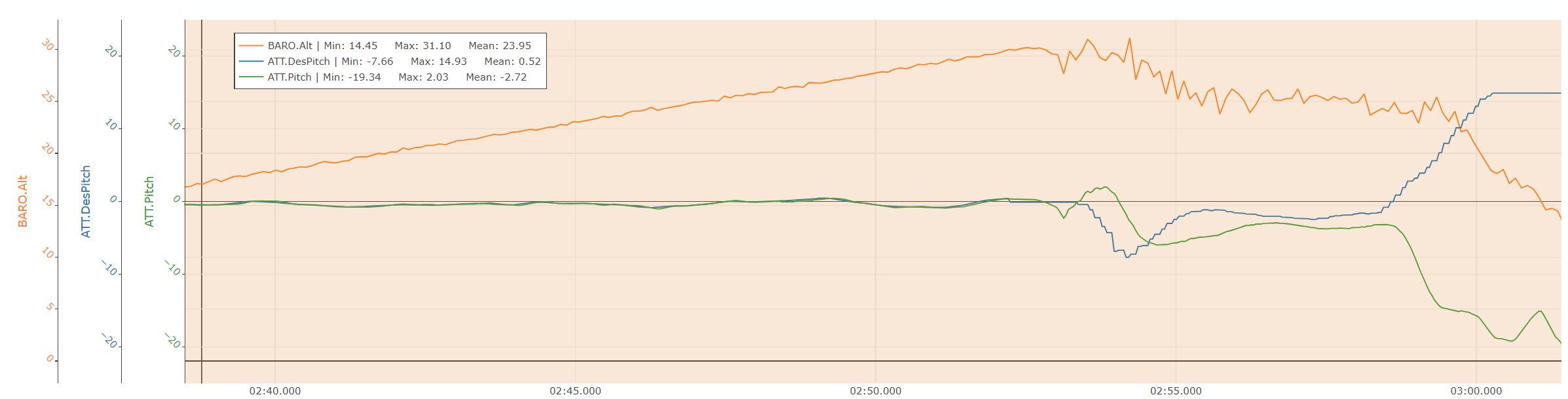
Hello. My quad plane works fine with manual transition but when I try to do it with automatic task, the vehicle loses altitude. After the transition is completed the vehicle tries to ascend but fails. When I look at the logs the pwm output and despitch are as they should be but the vehicle never behaves like the log data, it keeps going nose down. What could be the problem?
It appears that SERVO2_REVERSED is set to 1. Refer to this document to verify that this setting is correct. It is possible for the elevator surface to move in the opposite direction in auto mode even if it moves correctly in manual mode.
As you said the SERVO2_REVERSED is set to 1. But we check the control surfaces in both manuel and stabilize mode. Is it possible to correct in stabilize mod but wrong in auto mode.
Hmmm, from your logs I strongly suspect servo reversal.
If you have a log of a successful flight in manual mode, could you please post it? I might be able to find out something.
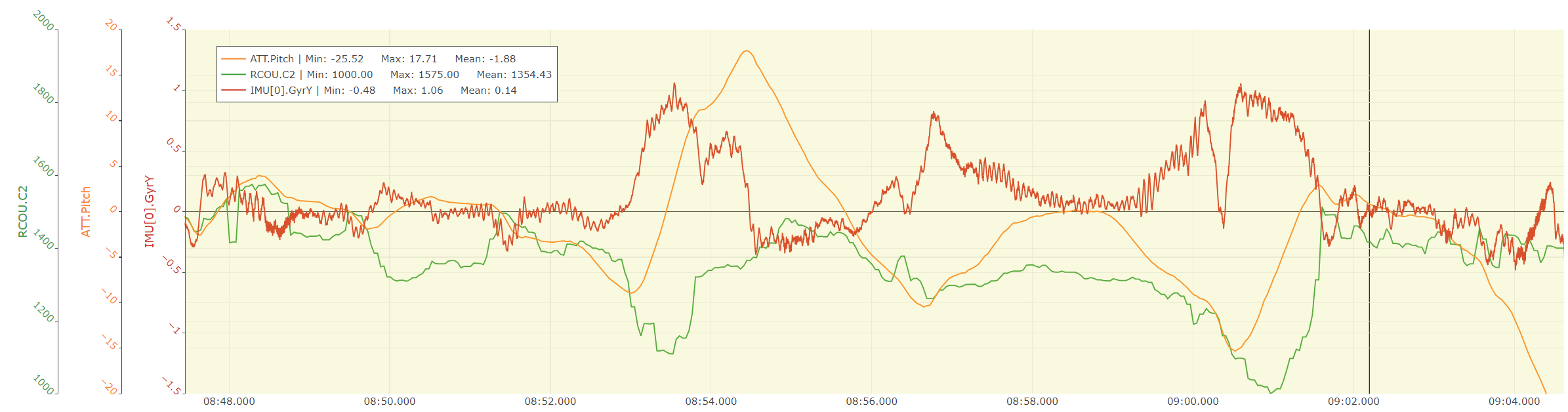
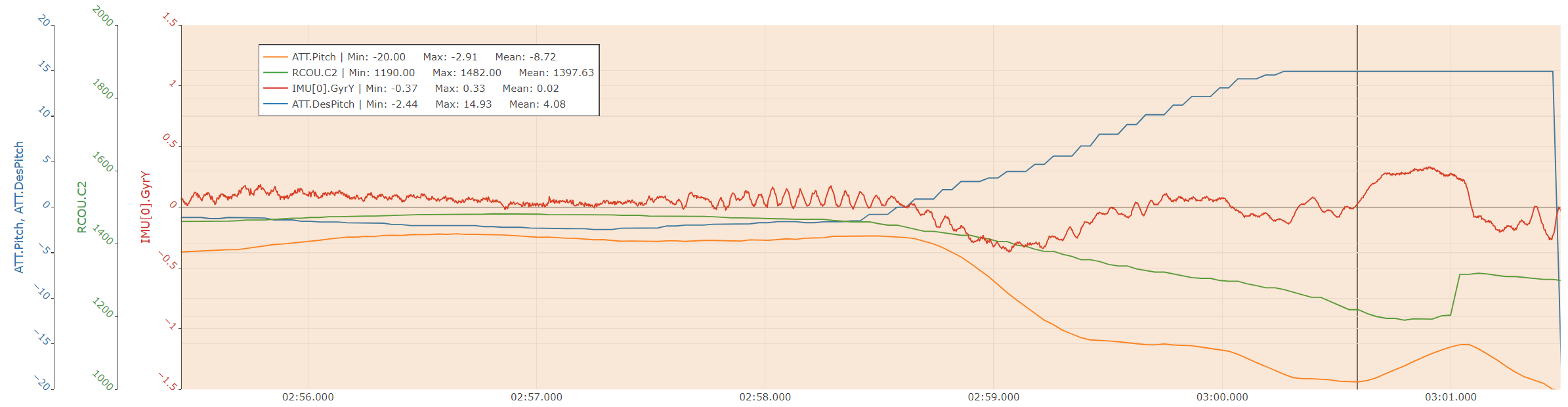
In Stabilize mode RCOU.C2 < 1150 is needed to get a fast rotation for pitch up (IMU[0].GyrY > 0.5rad/s), but in Auto mode it takes a long time to reach RCOU.C2 < 1200 to pitch up. It seems that FF & PID gains of the pitch controller are too small. You need to run Auto tuning.
Thank you for interst and help. But for autotune there is a problem. We have small area for flight and aircraft’s stall speed is 14 m/s and we generally fight with 18 m/s. Do u know a easier way to get better PID values?
If you follow this page to determine the FF gain and set the integral gain to the same value as the FF, you should get reasonably good control performance. All that is required is to pitch the aircraft up and down a few times in FBWA mode.
Note that without roll tuning, the aircraft will fly well off the way point. You must tune the roll as well as the pitch.