Hi Everyone!
I have been trying to fly one big VTOL for the last couple of weeks, I bought this second hand old VTOL frame and trying to fly it with pixhawk cube just for my learning. I have faced few issues in the past and asked helped from the community, I got really good response and it has been a great learning for me.
Recently, I have tested the fixed wing loiter mode and I have noticed few things. Here is the flight log: https://drive.google.com/file/d/1M55Vg79MeRdv0Zj3PbeTMvBXiza25Gdx/view?usp=sharing
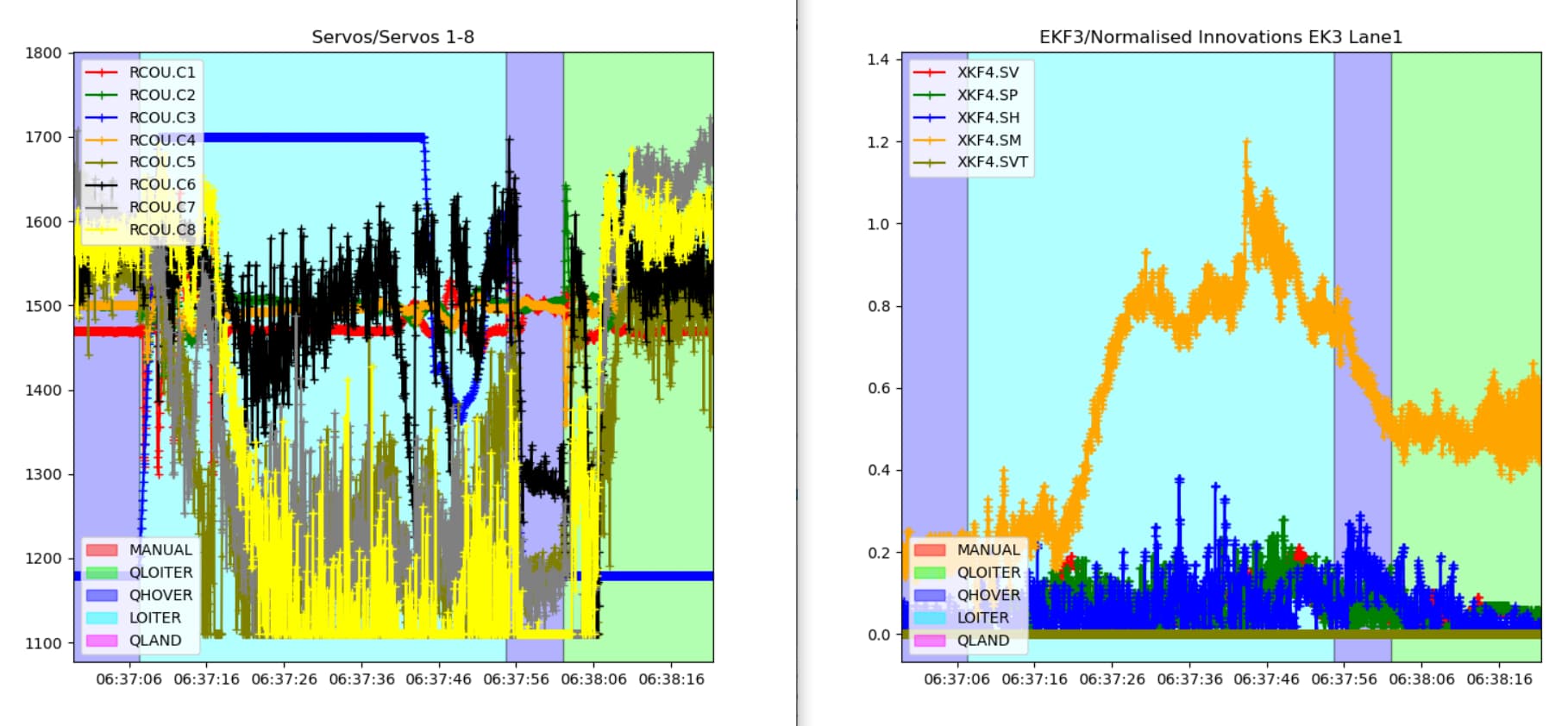
Compass Error was growing and went above 1 in the loiter mode. Is it common to grow EKF compass above 1 during turns? As plane was flying at high speed and during turns.
As per the wiki, the altitude will not change in the loiter mode but In my case quadplane climbed to 60m height from the 35m. But in the logs I don’t see any elevator deflection so I am curious to know how it climbed the height.
You would also see the z-axis vibration going above 60 and that is because engine was running at full throttle for the transition.
Really looking forward for your help, support and suggestion. Thanks in advance.
I hope this message finds you well. I have been trying to resolve few problem with my VTOL drone flying for over a week now, and I’m hoping someone here can help me out. Firstly, I want to express my appreciation for this incredible Ardupilot discuss platform and the amazing community that makes it thrive. Your time and efforts are truly valuable, and I’m grateful for every response.
To give some context, my VTOL has already crashed twice during testing, but I’m trying to fix it and make it fly for the sake of learning. I’ve completed the VTOL flying testing and have started testing the fixed wing modes, but I’m encountering a few problems. I created different threads in the past and received helpful responses, but unfortunately, for the last week, I haven’t received any replies.
I know you all are busy, but I would greatly appreciate it if someone could take a moment to guide me and help me make this quadplane fly. I believe this platform has some of the smartest people around, and I’m excited to hear from any of you who are willing to share your expertise. (@xfacta@hwurzburg@rmackay9@dkemxr@tridge)
Thanks in advance for your time and support. I’m really looking forward to hearing from some of the brilliant minds here.
You need to adjust your compass settings:
COMPASS_OFS_X -128
COMPASS_OFS_Y -112
COMPASS_OFS_Z -80
COMPASS_DIA_X 0.968
COMPASS_DIA_Y 1.028
COMPASS_DIA_Z 0.860
COMPASS_ODI_X -0.015
COMPASS_ODI_Y 0.002
COMPASS_ODI_Z 0.023
COMPASS_MOT_X -4.279
COMPASS_MOT_Y 1.578
COMPASS_MOT_Z -10.000
COMPASS_SCALE 1.00
COMPASS_MOTCT 2
this was a result of running MAGFIT on your log…lots of motor interference…notice the large MOT corrections (-10 means 500mg correction at 50A…that’s as much as the earths magnetic field!..also the max you can correct)
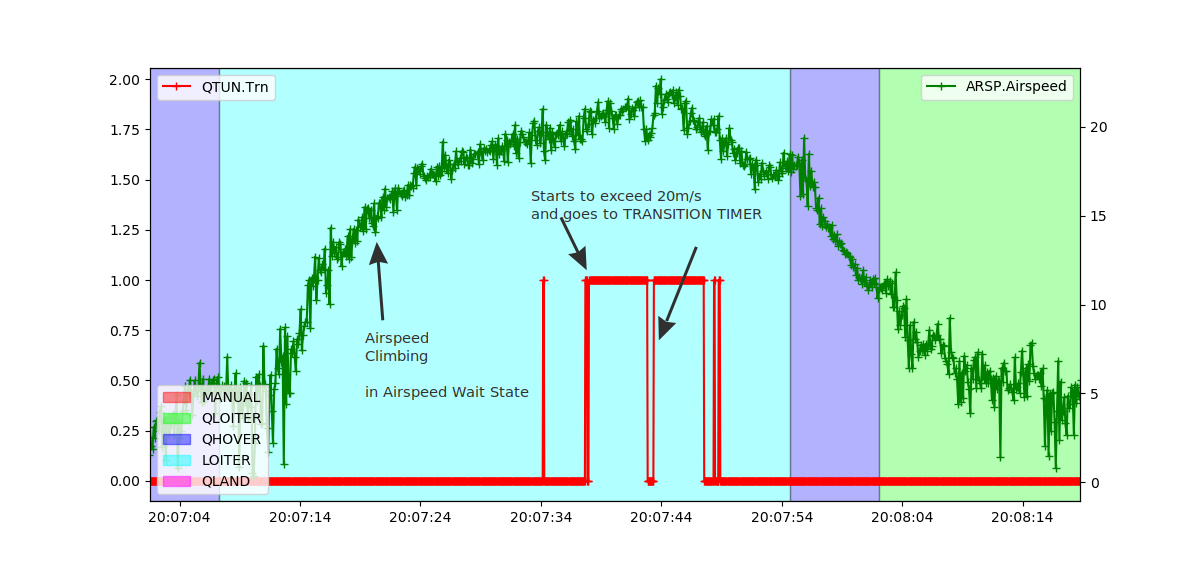
you transitioned to fixed wing using LOITER…because you did not have the Q_OPTION to keep the wings level as it was transitioning it was also banking hard to do the tight LOITER radius…and therefore had trouble reaching transition airspeed…it bounced around it but kept falling back into an assisted flight mode( which resets the transition) until you finally changed modes…do not transition into LOITER or CIRCLE if you do not have the Q_OPTION to level wings during transition…try transitioning into FBWA or set the option…TECS height control was just overpowered, it put everything into increasing airspeed …so to get the airspeed, keep a tight radius, at full throttle you climbed
Thank you so much for the detailed response Henry! This is exactly what I wanted to know.
Actually, I have set old compass offset through MAGFIT and it predicts the new different offsets with every new log. Am I supposed to update these after every flight? I will update these again.
Just one small doubt, How do you know this? I don’t have the current sensor installed in the drone. My drone is Engine based, 4 VTOL motors are powered by battery and fixed wing is operated with the help of fuel based engine. So If it has the MOT interference then it should show at the time when motors are running at the high speed (power/current consumption is more) but Compass error is growing in the loiter mode during which all the motors are running at low speed except motor2, means power/current consumption is low then there should not be any MOT interference problem. Am I right? I need to know your views on this.
I have set the Q_OPTIONS bit to 16 for the pure VTOL based QRTL and I have set the Q_ASSIST parameter for assisting during transition. But if I set Q_OPTIONS bit 0, for keeping the wings level during transition then what will help happen if I switch from Qhover to Loiter mode? How will the transition happen?
Actually earlier I tested the transition from Qhover to FBWA mode but I had a radio failsafe problem so I thought I will try the Loiter mode and I had a doubt on transition phase but I cross checked this in SITL and then tried.
I didn’t have the good radio system but I have borrowed one from my friend for the testing and that is center throttle stick and I don’t have experience flying the fixed wing with center throttle stick. If you have any experience on this then can you please share some details in switching & flying in FBWA/B mode with center stick throttle? I will try that.
If I set the Q_OPTION, 0 for level wing during transition then can I switch to Loiter mode?
This is really interesting as I have been wondering why it climbed. Now it makes sense.
Btw, I have set the loiter radius of 130m but it taken the circle with radius more than 200m+. Is that mean the 130m radius is not enough or is it because it was in transition phase and trying to increase the speed by keeping the turn angles as minimum as possible?
Really looking forward to your reply Henry and thanks a lot for taking your time to write this detailed response. I really appreciate your efforts.
My apologies…it was midnight last night…I did not notice you had NO current sensor…the MAGFIT was completely wrong…here is one with no current sensor…it will improve it, but not completely fix the mag deviations…the only fix for that is getting the compass at least 6-8 inches away from any power run…wiring, battery, esc, electric motors, etc…if you had a current sensor then the MOT param could be used…we really need to get MAGFIT to issue a warning if someone checks Motor Compensation and there is no current sensor…
COMPASS_OFS_X -139
COMPASS_OFS_Y -104
COMPASS_OFS_Z -97
COMPASS_DIA_X 0.993
COMPASS_DIA_Y 1.014
COMPASS_DIA_Z 0.800
COMPASS_ODI_X -0.028
COMPASS_ODI_Y 0.044
COMPASS_ODI_Z 0.010
COMPASS_MOT_X 0.000
COMPASS_MOT_Y 0.000
COMPASS_MOT_Z 0.000
COMPASS_SCALE 1.00
Q_OPTIONS…currently you have it set at 65536 which sets “DisableApproach-disable use of approach and airbrake stages in VTOL landing”…to keep wings level during transition set it to
65537, setting bit 0 also…see if that lets you transition…it will keep the wings level until the transition is completed and then begin the loitering…
it somehow did not make it into the copied image, but that third arrow says" airspeed falls under 20m/s and it resets to airspeed wait state and never completes the transition"
Using SITL to check things is a good idea, but it is an ideal plane with different power, inertia, control authority, etc. than many real-life planes…just one typical plane…so behavior does not replicate many planes actual aerodynamics…
to use a centered throttle setup for rc you might consider setting FLIGHT_OPTIONS to 1026 to make center throttle be TRIM_ARPSD_CM in autothrottle FW modes and TRIM_THROTTLE in non-autothrottle (except manual) modes…
I have already put the wire far away as possible from the compass. Can vibrations cause the compass error in any way? because Z-vibration is going up to 60 and as I mentioned earlier the electric power consumption is low during transition phase compared to other phases. But I will cross check it whether all wires are around 6-8 inches away or not.
I will try that! just one small doubt, what would be the loitering center in this case, the position where I will switch the mode to loiter or the position where transition will complete?
Thanks I will try this, but as my drone is little big so I have little fear to control it manually. So I might first try again the loiter mode and then try this.
I will test it soon! Hopefully things go right this time. Thanks again for your valuable time.
vibration does not impact compass…it impacts lots the attitude control loops …
the loiter center is fixed upon Loiter entry…preventing it from turning does not change that…it will catch up
I hope you are doing good. I have fixed my quadplane and started my testing. In the recent test, I have noticed that again sometime the compass error is increasing. I have found the issue, it is increasing because during flight one of the power line inside the drone is moving and sometimes moves little closer to the GNSS compass.
I have ordered one more GNSS compass and also planning to increase the height of the compass, because my frame is already weak and I can’t take any risk. I have something to ask you, currently I have here 3 GNSS and I have ordered here 3+ GNSS both have around 20cm wire length. So I can’t keep them far away from each other. My queries are:
Is there any minimum distance which I have to maintain from both the Here 3/3+ compasses so that they won’t interfere with each other?
How good are the compass wire shielded? I can increase the compass height but the compass wire might come near to the power lines.
I have read somewhere the dual GNSS also decreases the compass reliability and makes the system more redundant, what is your take on this?
Is there any fixing formation for compass which might help? like both placed along the fuselage or placed along the wing?
no GPSes should not interfere with one another…but all must have a clear “sky-view” to see the satellites signals…ie no metal in the way toward looking at the sky
compass wiring is not the issue, its the compass itself that must be located as far as possible from electromagnetic sources like wires with current flowing thru them, batteries, or even significant passive metal objects.
dual GPS has no effect on compass reliability…only on GPS reliability…if the first GPS fails, the second GPS will be used
4.no…getting a compass as far as possible from the motor/battery wiring is the most desirable…multicopters put it on top of a 6-8inch mast above the copter…planes usually locate it toward the rear of the plane (unless its a pusher) or out on a wing…
Hey Henry!
I hope you are doing great. The new GNSS has arrived today.
I have fixed the both GNSS and did some flight test. I have extended the height of both GNSS with the help of stands which came with them. Hope they don’t come off during fixed wing flight.
I am trying to do compass calibration with the help of Magfit for new compass but I could not able to do. Is it possible by any ways if I can do the compass calibration of the new compass added without performing it manually? As my drone is little big so it is hard for me alone to do the manual compass calibration.
I have found one wiki page talking about GPS for Yaw and it is also mentioned that it works without RTK fix also. I did not understand it fully the working so I thought to ask you, will it work in my case? I have 2 GNSS (Here3 & Here3+).
And one more I want to make some mechanism like gimbal for some winding and rewinding purpose. I have one gimbal motor and one bidirectional ESC, I want the gimbal motor to only rotate few revolutions in both directions at a particular (slow) speed so is there any way I can make something like this? I checked, gimbal motor is rotating in both direction with bidirectional ESC, I can control the speed with the help of changing pwm range but the problem is it won’t stop after few revolutions, it will keep on rotating until we put stick at center.
I have tried with servo motors but servo won’t work in my case.
see the Large Vehicle Mag Cal: Compass Calibration — Copter documentation
but you need to manually set the compass orientation and since the orientation will not be automatically set…then you can do a flight that the logs will allow a MAGFIT to be done…
HERE3/+ are both M8 GPS and cannot do yaw as a combo…you need at least one F9P or the new Unicore NMEA gpses to do moving baseline yaw
…you need to find a winch motor or servo…some servos for sailboats can turn 3 turns in each direction can be controlled by PWM…like this HS-785HB Servo - ServoCity