Hello gentlemen,
I just upgrade my quadplane to Arduplane FW 4.3.1 from 4.2.3.
The drone flew perfectly using FW 4.2.3, and I have conducted several way point missions without any issue.
Just yesterday I did upgrade to FW 4.3.1, I have got some issues. First is all servos are showing erratic behavior, in FBWA mode elevator servos move very little, when I did test on the ground after arming. While aileron servos are normal. So servos shows very strange (erratic) behavior, compare with previous FW. (4.2.3). Secondly, I get error : “Compass Inconsistence” many times when I turn on the drone. I use dual GPS and Cube Orange.
After I rotate the drone, then I don’t see any Compass Inconsistence message. I can fly very well in FBWA mode without any issue. Then next day I did full AUTO MISSION from take off to landing. This is what happen during AUTO MODE:
1). Arm (no error)
2). AUTO mode (no error)
3). Start TAKE OFF (no error, setting TAKE OFF altitude is 45m)
4). Drone only reached 30 m, then heading to WP 2 (Setting WP2 is 80m)
5). Then I got :”Error Compass Variance” messages, EKF become RED.
6). Drone was flying to WP2 at 30m altitude, and started to do Transition (supposed to be 45m heading to 80 m).
7). While Error Compass Variance keep going, speed reached 15m/s
8). Got message Transition done at 13 m/s
9). But drone was flying at about 30 m Altitude, and even down to 26m (almost crash to big trees).
10). Then I switch to RTL and tried to take over the control.
11). Drone seems to be confused and just hover at 30 m altitude
12). After a few second , drone start to fly a bit higher heading to home
13). Then I switch to FBWA to increase altitude, and drone can fly as normal.
So, first issue: Why drone can not achieve 45m take off height, but only 30m instead?
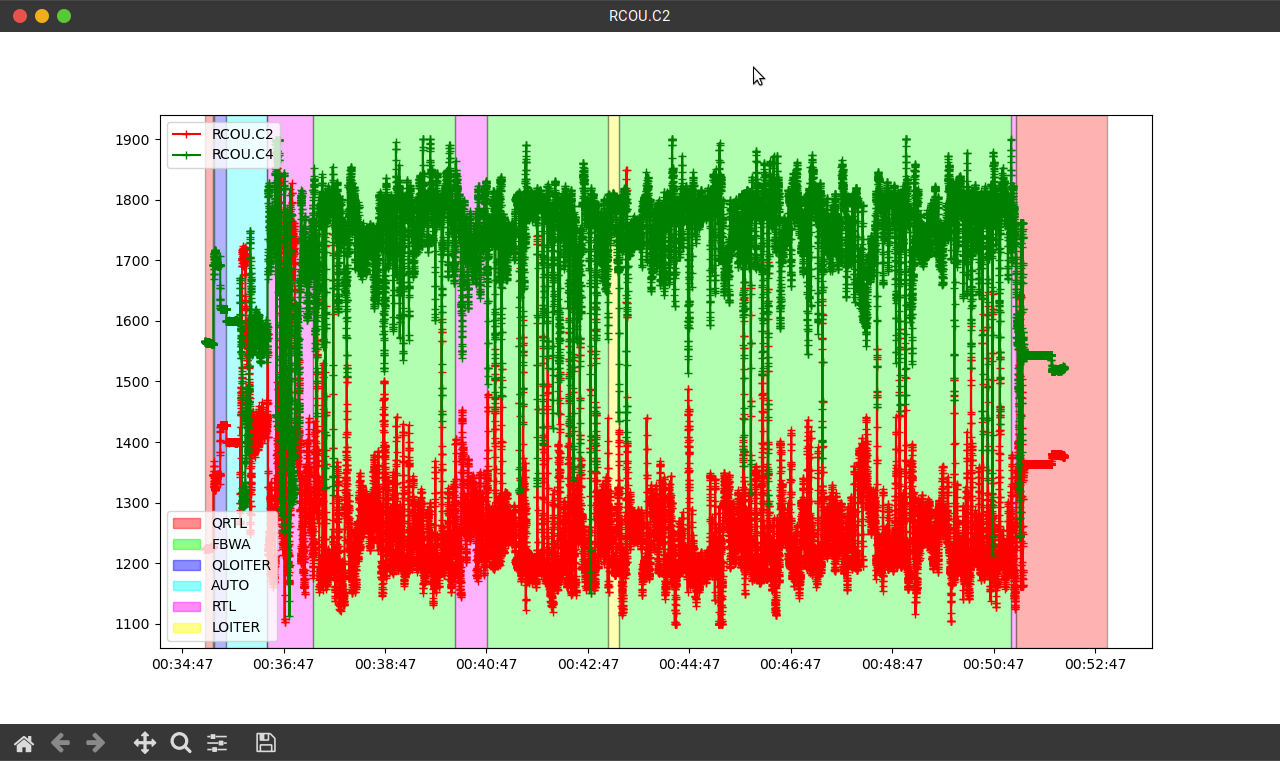
Second issue: why elevator servo don’t move as normal (so can not achieve target pitch in AUTO), but in FBWA mode it works as normal during flying.
Third issue: why all servos behaves so erratic using FW 4.3.1, while they behave normal in FW 4.2.3 ? Do I miss something in FW 4.3.1 ?
So I still don’t understand what is root cause of this problem…I need help to analyse the log further to solve this problem. Maybe @tridge , @andyp1per
@Allister , @geofrancis or other experts could take a look the log.
This is the log files (bin log and tlog)
https://drive.google.com/drive/folders/1U3bNSnNaebpG5nUpsg1rrGgmGCfnD0tK?usp=sharing
Thank you very much for any help to solve my problem. I hope tomorrow I can do the test again.
Best regards,