hi all (and especially @ianfreemantle who I promised an update to a while ago).
I know it has been quite a while since this issue was raised, but we’re finally getting somewhere. Over the last week I’ve been working with @kris and Brandon MacDougall over in a new quadplane ardupilot discord channel (see https://ardupilot.org/discord ) and in the simulation channel.
There are several efforts happening in parallel:
we’re working to create two good quality tilt-rotor quadplane models to allow us to test solutions to this and other issues affecting tilt vectored quadplanes. The first model we’re building is a model of the Arace Griffin https://araceuas.com/ thanks to assistance from Alex and Adrian from Arace.
I’m working with @kris to incorporate a number of changes he has made for ArduPilot on tilt-vectored quadplanes. This includes changes to yaw handling in transitions using differential thrust to cope with yaw inbalances. We’re discussing a possible change here: https://github.com/ArduPilot/ardupilot/pull/15960 . That work is on hold until we get good simulation models for testing
I’m working with Alex from Arace and @iampete to work on a list of feature priorities for these types of vehicles.
I’ve started work with @Leonardthall on a new approach to tilt vectored quadplanes that will use a vectored AP_Motors backend, so knowledge of the vectoring of the motors is build right into the motor mixer, instead of being an add-on in the ArduPlane code. That should allow us to get much smoother transitions under a wider range of conditions. We’re hoping to prototype that code over the next month.
A number of people have offered to test some of the proposed changes. I’d like to hold off on that for a few days at least until we have the simulation models working and the changes tested in simulation. Once that has happened we’ll start looking for people to test the changes.
Sorry this work has taken so long to get started.
Cheers, Tridge
I can already offer some advice based on testing on this model.
If you are flying ArduPilot stable or master releases or then you should keep the Q_TILT_MAX angle small. One of the key differences between the ArduPilot releases and the firmware that @kris has developed is that his firmware can handle large values of Q_TILT_MAX. For example, ARACE normally set this to 73 degrees for the Griffin. If you try to fly ArduPilot 4.0 or current 4.1 with Q_TILT_MAX=73 then we get wild yaw problems and the aircraft crashes in the simulation. If I test the firmware from @kris with the same settings then it flies well.
This will be the focus of my work on tilt quadplanes in master, fixing the code so that yaw is handled well with large tilt angles.
Cheers, Tridge
Here is the log of my first and second transition. The first was accompanied by a significant left yaw so it could be worth a look…the second not so much, no parameter change. Q TILT Max = 50 QTILT RATE DOWN =80, QTILT RATE UP = 200, these are Parameters from foxtech 4.1.0dev currently running 4.0.7.
Greg Covey identified that my servo auto trim needed changing for safer flight…weird I have just connected my nimbus via mission planner and servo auto trim is set to 1 apparently this was off during flight > to a continued decent and Q Stabilise bail out. My parameter file also has my q-alt-assist as 30 yet my current parameters in MP indicates 0. Just a couple I’ll be sure to check during pre-flight.
If you are willing to be a guinea pig I can build you a test firmware with my new tilt handling code. Note that you would likely be the first person to fly it outside of simulation, so it is not a low risk flight.
Are you interested?
Cheers, Tridge
So likely the only thing that will change is transition? i.e be prepared to flick back to Q- Stabilize if it looks like its turning south… If that’s the case sure. I’m following Discord too when you are confident, I would like to send through my parameters and we could make sure my FS options and Q assist options will do just that. With the east coast low ATM it could be a few days days.
Steve
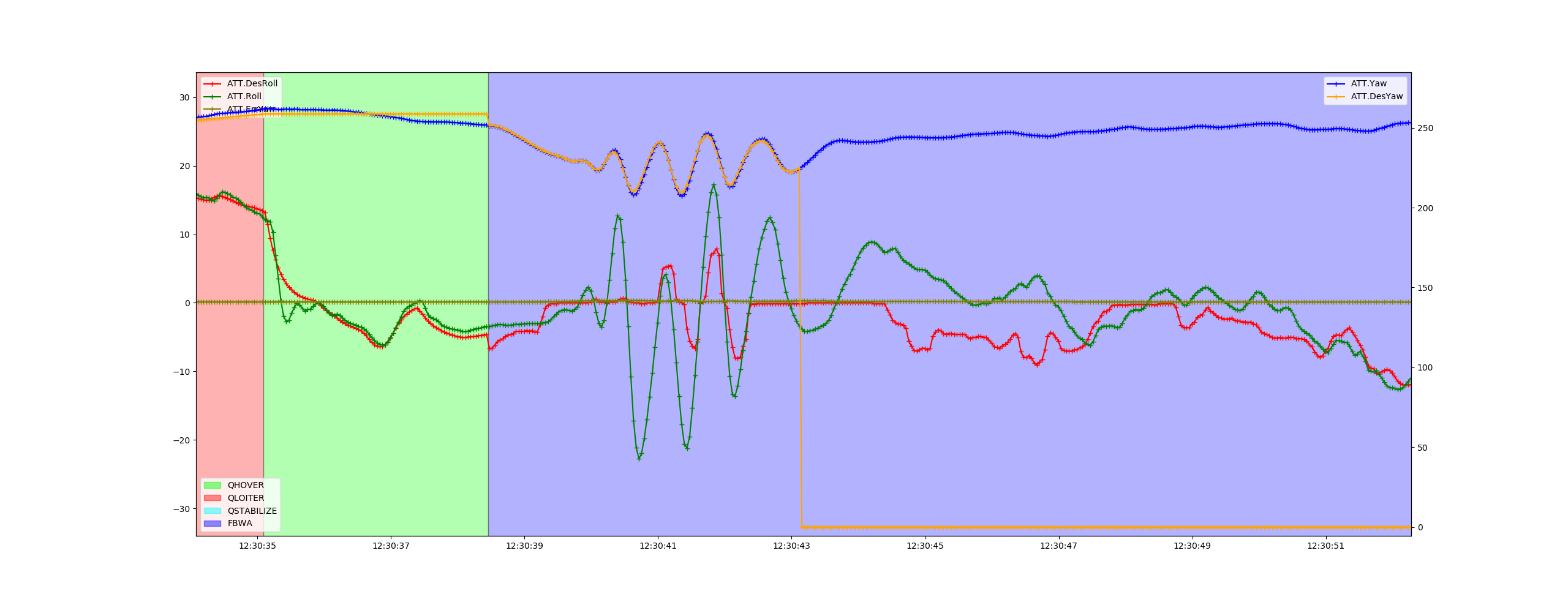
is this problem unique to tilting quadplanes? I just flew my Y3 tiltrotor in FBWA today and the transition was very sketchy. As the motors go down, the plane developed violent roll and yaw oscillations for a few seconds until speed picks up and oscillations die down. After reading this post, I have the impression that i’m looking at the same issue here. I’m guessing that when tilting down to my Q_tilt_max of 45deg, there is some yaw error which led to differential tilt which introduced very strong rolling moments which cannot be eliminated just with motor thrust only. This cut out as the FBWA law replaced Qhover. I have the yaw and roll parameters plotted below. If someone has a suggestion I’d really appreciate it. reducing Q tilt max further seems to be stopgap because it is constrained by how fast I can accelerate to a safe speed.
note that in the plot above, yaw error is almost zero throughout the flight. maybe it’s the other way around, i.e., roll error causing thrust changes which led to yaw? I think an ideal control law would just try to minimize the side slip during transition so that the nose is kept pointing forward, but without a good set of sensors side slip is probably difficult to obtain reliably anyway.
Password is Password. First flight since the rains began two logs 3 videos. Not sure if you still need 4.0.7 logs but the video shows a pretty ordinary transition that could be useful; Nimbus V2 TOW 5.4kg Cube Black