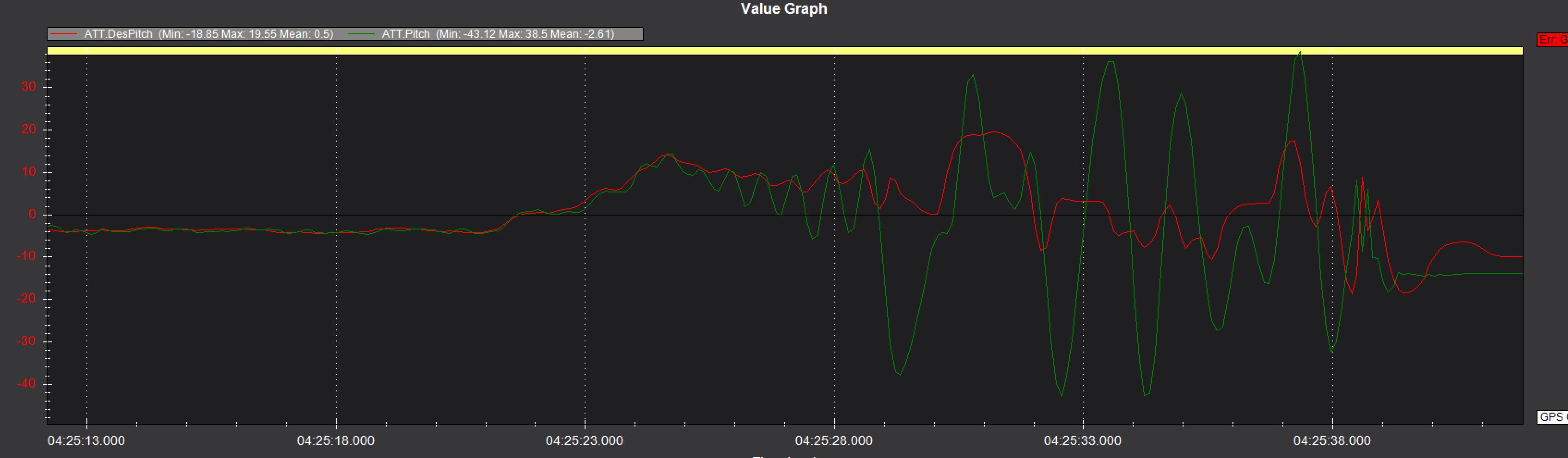
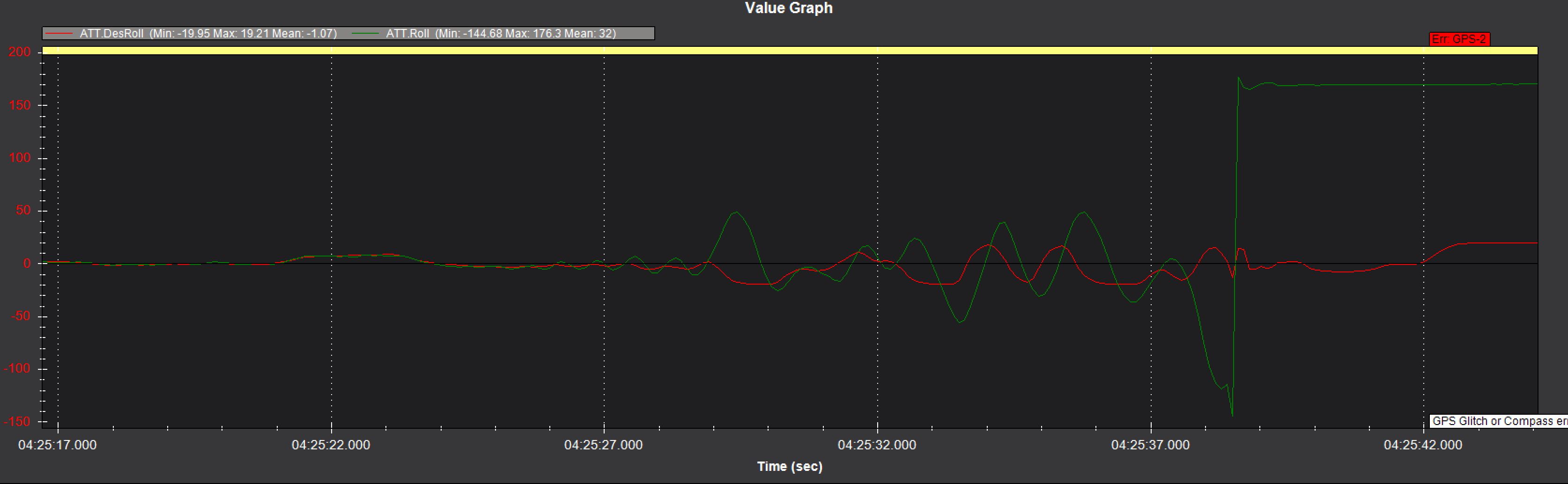
Dear Friends, my quadcopter with V5 CUAV fligth controller meat crash on its mid fligth. The model behaves similar to Toillet Bowl effect and experience high dynamic osilation on its mid fligth and ended with crash. Fligth log attached for your kind reference. Please share your views & reson for the crash
Describe the components on this craft. These are almost certainly way too low:
ATC_ANG_PIT_P,3.2
ATC_ANG_RLL_P,3
And the Rate PID’s could use help also. IOW it’s poorly tuned. I would reset the PID’s back to default, set these parameters and make a short hover flight in AltHold so we can see a baseline:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Also depending on the ESC’s you have review this and set accordingly: Motor Ranges
Dear dkemxr,
As per your guidance, we have updated the motor spin values, and executed the flight test the model misbehaves when flying mode changed to Loiter, corresponding log file attached for your kind reference, please share your valuable suggestion. Log File
With Thanks & Regards
Dr.V. Kirubakaran
Dear dkemxr,
Sorry for the delay and inconvenience caused, please find the attached link and kindly do the needful. log file
With Thanks & Regards
Dr.V. Kirubakaran