I am using arducopter 4.1.0-dev master version on Pixhawk 2.4.8 running pixhawk1 firmware on a quadcopter with Here+ RTK GPS. I am taking RTK GPS as primary EKF3 ALT source by setting EK3_ALT_SOURCE to 2. Also, I have kept EK3_ALT_M_NSE to default i.e. 2. I managed to get RTK float with base station accuracy of about 0.5 meters and flying drone about 50-60 meters of range from base station.
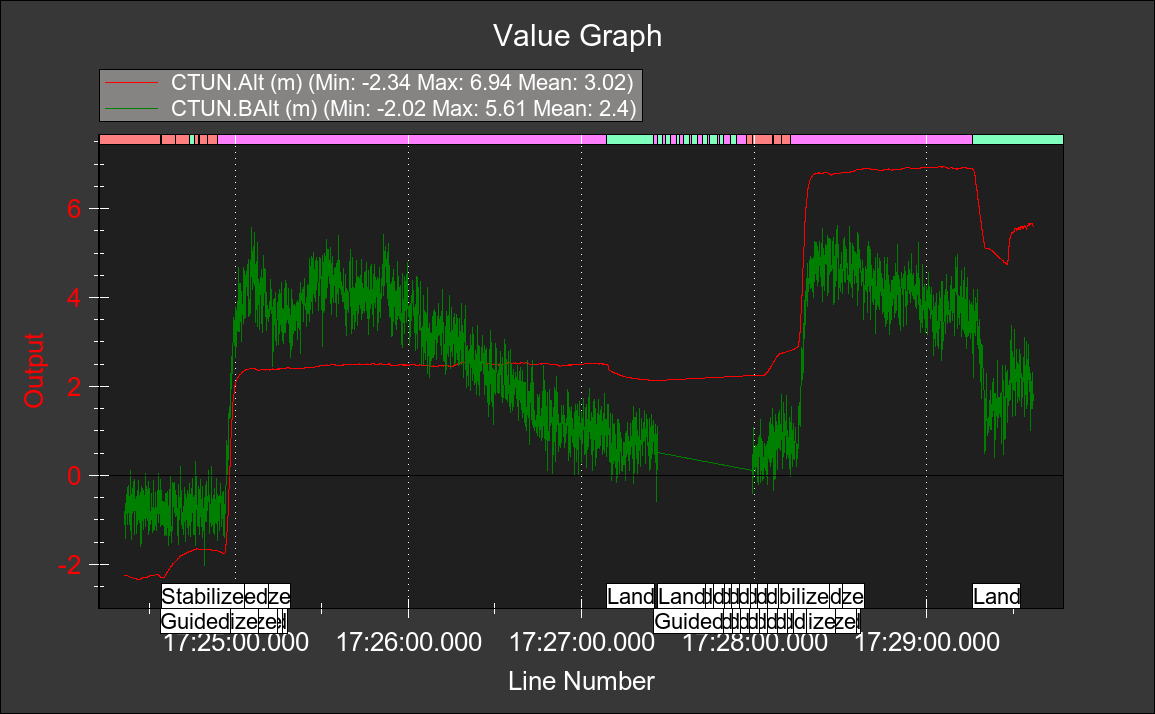
I am flying my quadcopter in guided mode and running a mission where i am giving navigation commands to quad to maintain the constant 4 meters altitude during the whole flight. In my last flight with this quadcopter, after takeoff my drone started coming down slowly during the flight and almost touched the ground, made an altitude drift/change of almost 4 meters in 2 minutes 32 seconds flight time.
When i checked the log i saw something which was not right, my GPS.Alt was not changing as the drone started coming down, but my baro altitude showing right log graph where it can be seen that drone does declining, but as i selected RTK GPS as EK3_ALT_SOURCE that’s why POS.Alt or CTUN.Alt showing same level of altitude as of GPS.Alt. This can be seen in the graphs below:
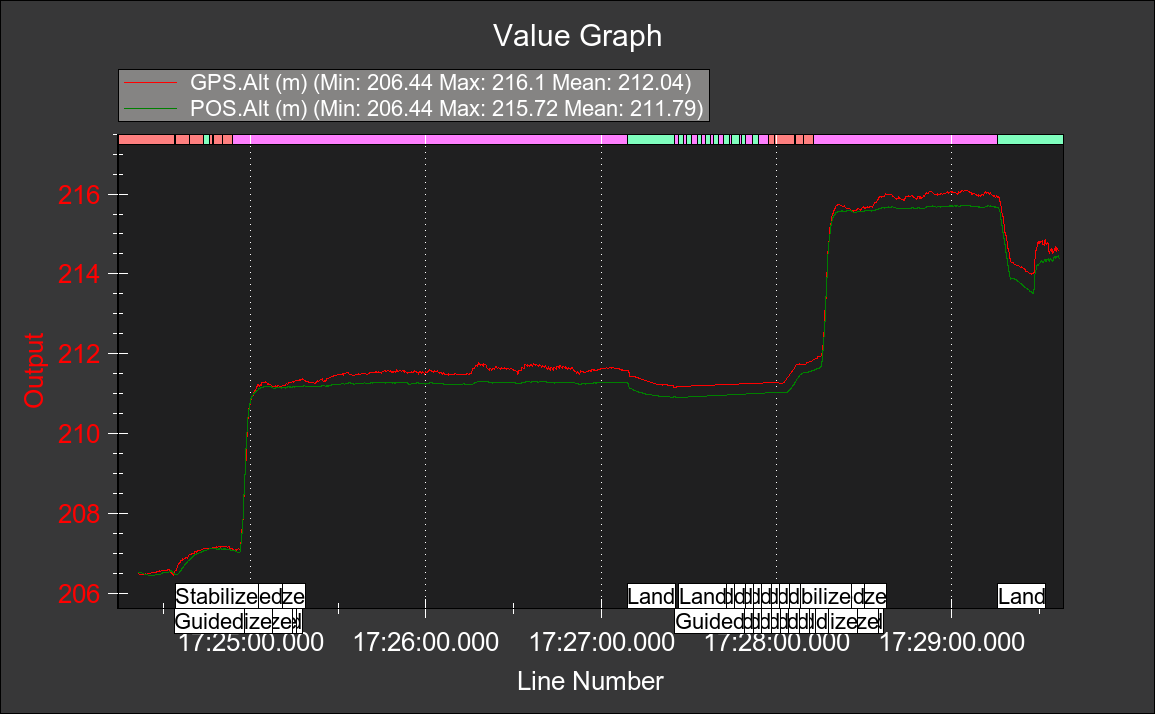
Can anyone please help in diagnosing this issue, i am not sure why GPS.Alt was not showing right raw altitude as drone started to lose altitude ?
This is the log :