My large quadcopter just dropped out of the sky while in Guided mode (i.e. all motors cut instantly). Please can someone help me understand what went wrong? I had several successful Guided mode flights just before this.
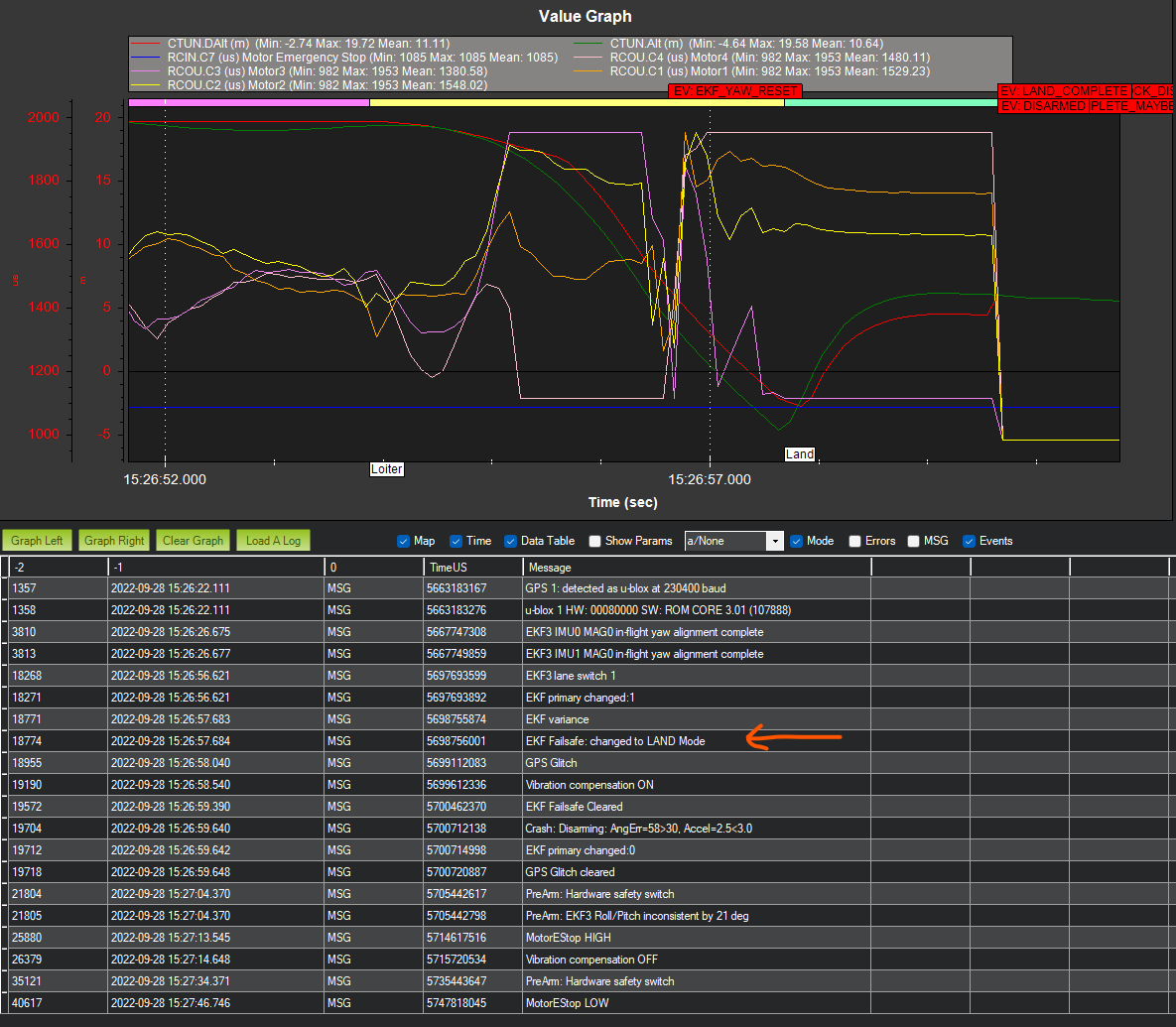
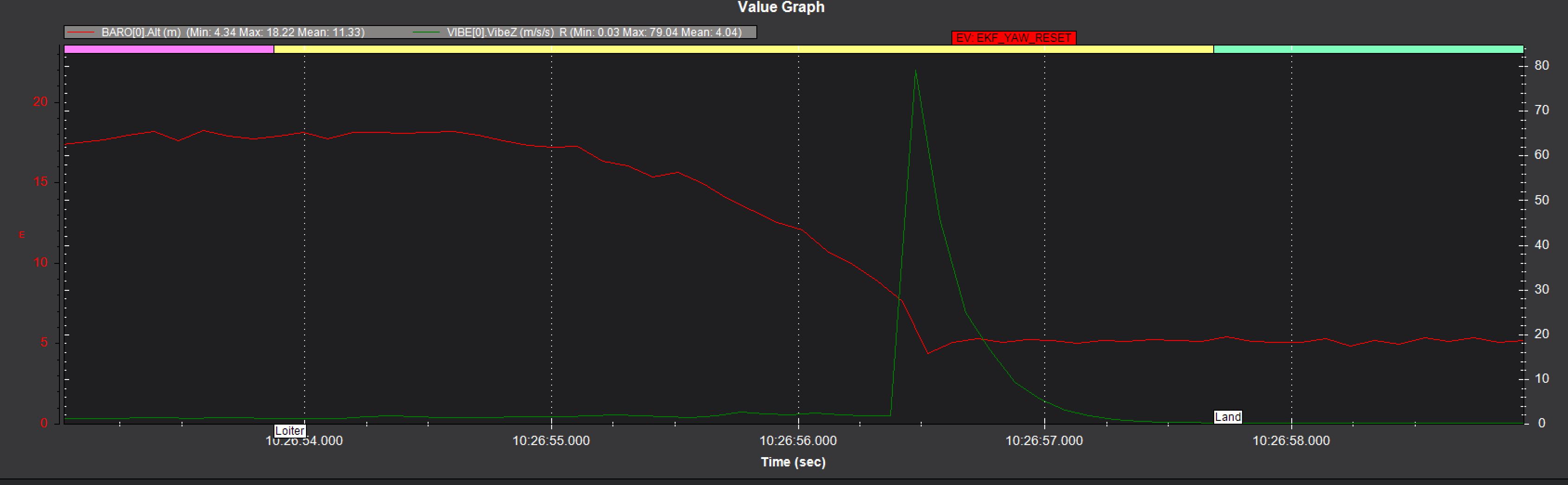
The log just says: “EKF3 lane switch 1” and “EKF Primary Changed: 1”. I also see “EV: EKF_YAW_RESET” at the time of the crash.
POWR.Vcc never goes below 4.72v so a brownout of the Pixhawk does not seem to be the cause.
The last time this happened to me, I did a disarm with the magic number in Guided mode (which forces a disarm, even when in flight) but I no longer use this code. I thought I might have accidentally touched my emergency motor cutoff switch but it does not show this in the log and I am not aware of actually doing this.
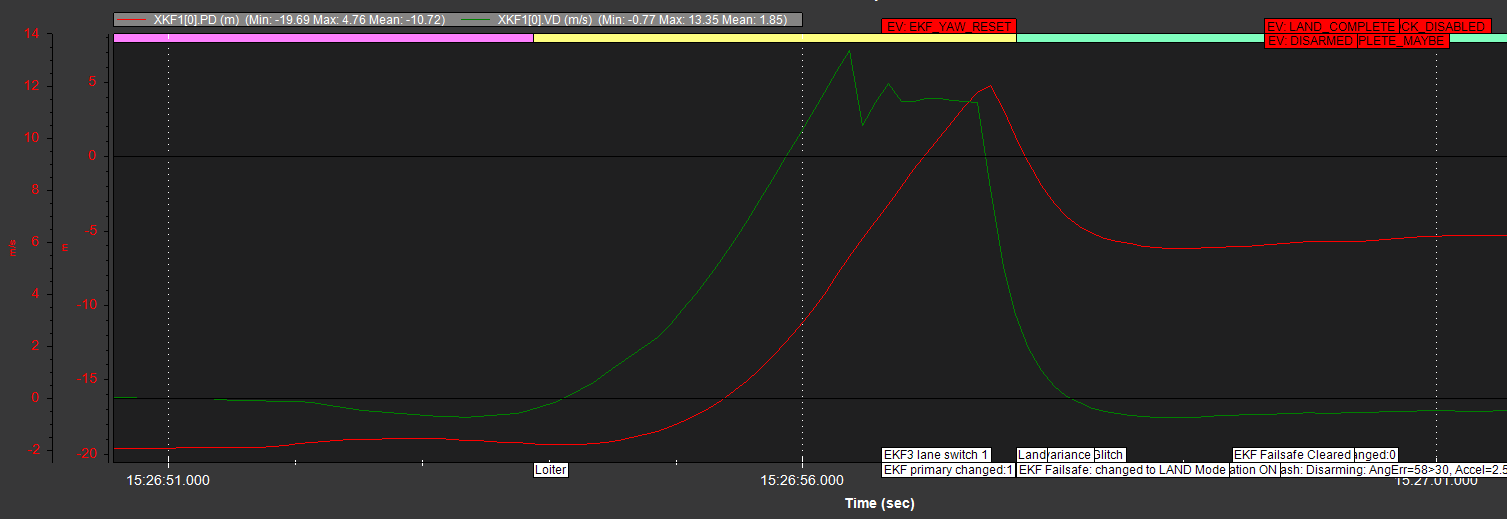
Screenshot of log (vertical velocity and position):
But a minimum throttle should not make the drone motors cut out.
The drone was in freefall.
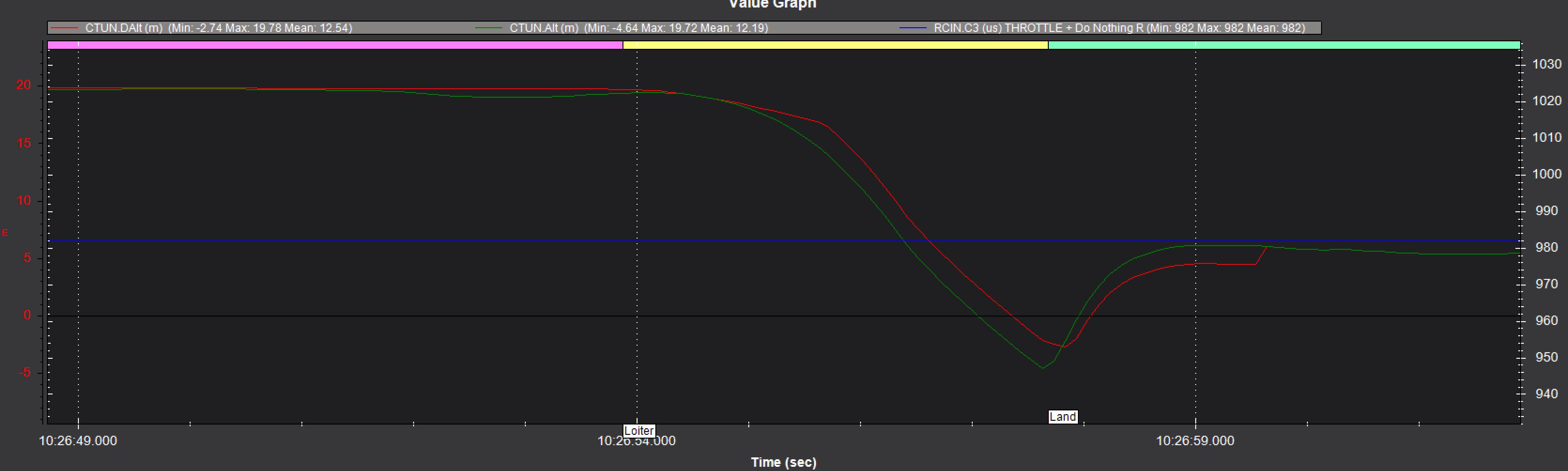
I fly this drone regularly in loiter mode and the descent rate is the default for loiter mode. I.e. the drone ascends and descends at a fairly slow speed when in loiter mode.
They didn’t actually cut-out. At least the command didn’t, you would need motor RPM data to know for sure. But Motor 3 was commanded to Max, indicating a loss of thrust, shortly after the mode switch and then Motor 4 dropped to minimum to stabilize. By then there was a lack of thrust and it was going down.
I am certain that Loiter mode did not cause a crash.
That said, I can see what did it. I believe I overrode the hardware safety switch while in the air. Obviously a very stupid thing to do, however I am surprised this behaviour is possible.
What I mean by this is, if you try to disarm the drone in mid-air, this will not be obeyed by Arducopter unless you give a magic number to override things.
With the hardware safety switch, apparently Arducopter will disable it, even when flying.
The reasoning for disarming the safety switch at the end of the mission is to force the user to re-arm it for each mission. I.e. a safety feature. Something went wrong in my code this time alas. I may submit a pull request to get this fixed as it will be a copy and paste job from the arming code I expect.