Hi
We need help in finding the issue that caused the crash of our quadcopter.
That was the first flight of this specific drone (but not the first flight of a drone from this model.
The dimensions and configuration of the Quadcopter are as follows:
- Dimensions: 1450mm motor to motor
- Flight Controller: Cube Orange
- Firmware: ArduCopter Stable 4.2.3
- Batteries: 6S1P @ 30Ah, semi-solid state
- Motors: T-Motor MN605 320 KV
- ESCs: T-Motor Alpha 60 A LV
- Prop Size: 22 inch
- T.O weight: 9.5 kg
- Dual RTK based on Ardusimple SimpleRTK2B lite.
- External compass Drotek RM3100.
- 3 Lightware LW20/C LRFs (front, up, down)
- EK3_IMU_MASK set to 3 (IMU 0 + 1)
- Main heading source is the GPS
Logs and parameters file:
We are trying our best to find the reason behind the crash, but so far I have no idea what the core reason was.
I was able to find several anomalies:
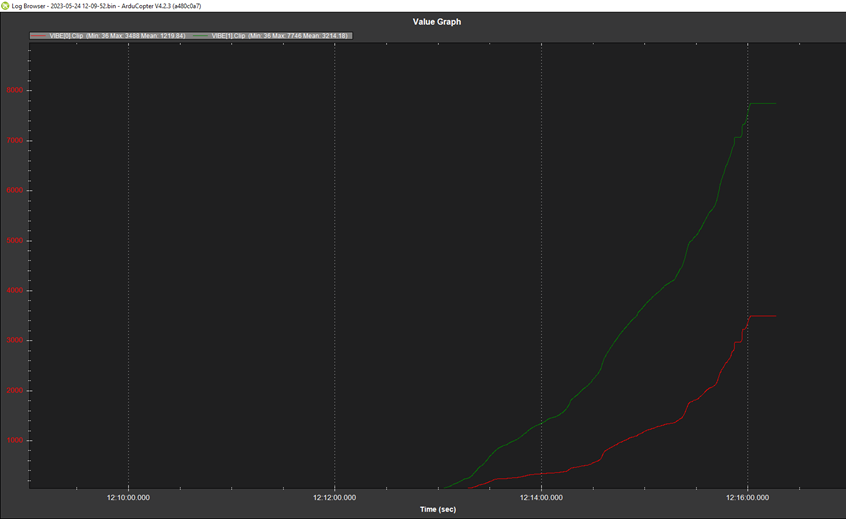
• Clipping
- Both IMU 0 + 1 had a super high clipping counter from the beginning of the flight.
- The vibration in all 3 axes seems to be OK.
- The Z acceleration of IMU 0 + 1 has high spiks.
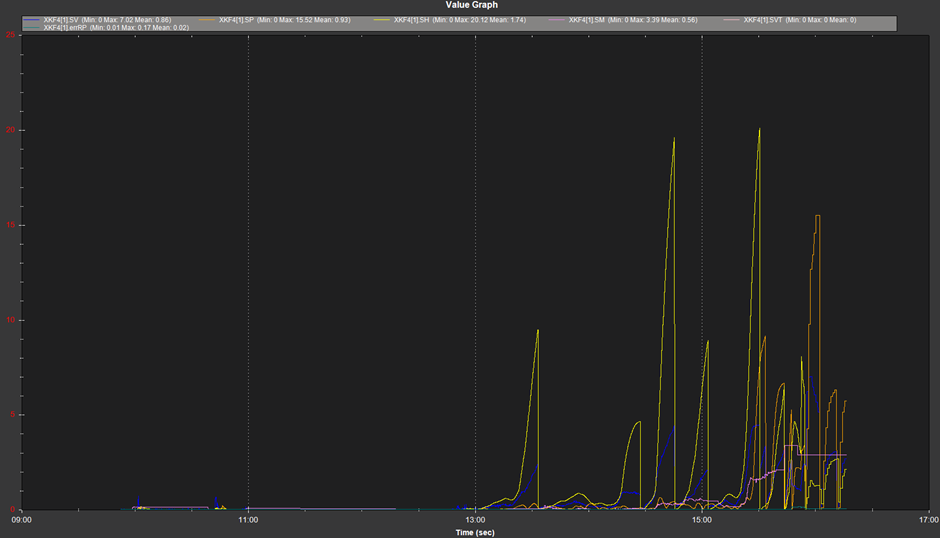
• EKF3 core 1 behavior
- Based on XKF4 [1], the SV, SP, SH, and SM look crazy, I have never seen this before.
- According to XKF4 [1] SS, it looks like the core had 2 initializations in air.
• EKF lane switch
- About 3 minutes into the flight, the EKF decided to switch from core [0] to core [1] (although the poor performance of core [1]). I didn’t find out why.
- From this moment the flight was not controllable anymore and the drone crashed less than 10 seconds after this point.
I really need help with this one, I would appreciate any clue.