Hello,
I am using Arducopter 3.4-rc4 on an AUAV PixRacer board installed on a (clone) S500 frame.
The quadcopter uses a uBlox Neo m8n GPS unit and everything is powered via a Matek v3.1 PDB. Current and voltage monitoring is provided by a genuine 3DR Power Module v1.0 from my old APM 2.6 quad. Motors are SkyRC X2830-950kV with 40A BLHeli ESCs. Powered by a 5200 Zop Power 30C 4S LiPo. Telemetry is a 3DR 433MHz module (clone) and the TX is a Flysky FS-i6s with a iA10 RX.
First tests (10 days ago) of this quadcopter were done using AC 3.4-rc2 and were successful: with all pre-arm checks enabled, I was able to arm using both compasses (external and internal, no compass variance errors, correct heading e.t.c) and the basic flight modes were fine (stabilize, AltHold and PosHold). Just doing simple movements - mostly testing hovering as this was intended to be a camera quad - no problems. Two times I’ve even used RTL and it came back fine without any issues.
The reason I upgraded from 3.4-rc2 to 3.4-rc4 was because I had some issues connecting the PixRacer to Mission Planner via USB cable (9 out of 10 times it did not connect at all), so when I read the announcement for rc3 fixing the issue I performed the upgrade via Mission Planner. MP reported that AC 3.4-rc4 was available in beta but after flashing the firmware, it was reported as rc3. Unfortunately, I did not noticed that yesterday after performing the upgrade as I thought it was just a mismatched version string. After upgrading, I recalibrated the radio, the accelerometer and the compass. No issues.
Today, I went to a football field up to a mountain nearby to test the system. Everything went fine initially: performed compass calibration with no issues (both compasses working, external is #1), took off in stabilize mode and then switched to AltHold, no issues. Immediately I switched to PosHold and the S500 was responding just fine: holded position perfectly besides some small gusts (1-2 Beaufort). I then proceeded in flying the quadcopter around the field at about 10m from the ground.
While I was flying around in PosHold, I was simply trying to get the ‘feel’ of this new firmware version by doing what I was doing in the past days (unfortunately, there are no datalogs from rc2 as I had a corrupt FAT32 filesystem on the PixRacer MicroSD card and had to format it); doing quick passes in PosHold trying to simulate camera recording. Telemetry on the ground was OK, I was using Tower Beta and it had correct readings for battery, height and flight mode (PosHold with 3D+DGPS).
While flying around suddenly the quadcopter begun to rise without using throttle - the stick was at the middle position - at full speed and in a couple of seconds it was at about 90m high. Immediately I flipped the RTL switch to bring it back but it kept climbing and could not see it anymore; I could hear the motors having full throttle but I could not see the aircraft. Telemetry on the ground did not report anything and it was stuck on PosHold mode, even if the TX switch was at RTL.
To make things short, I was in panic mode and tried everything to get the quadcopter to the ground, switching also to altitude hold and lowering the throttle at 40% so that it would come down but it didn’t. Not even switching to stabilize helped with throttle at 0%, the motors were still working in full speed and I could not see the aircraft. In a minute or two (cannot remember) the quadcopter fell to the ground about 30 meters outside the football field and crashed onto rocks. The area is not occupied so none was hurt. As for the quad, broke two arms, the landing gear, two motors are totalled, the ESCs might be OK but can’t be sure (their LEDs work and I can hear the motor tunes the two other motors do), the GPS is OK but the pole is broken and the battery is OK as well (I found the quad nose down between some rocks and it took almost 1 1/2 hour to locate it). PixRacer and the RX are working too and was able to locate the SD card so I have the log of that flight.
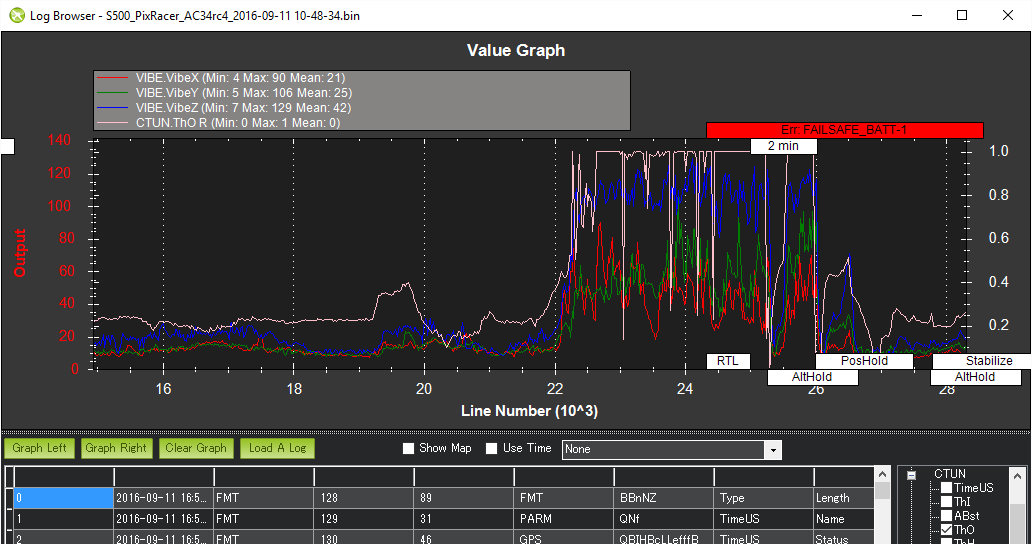
I am attaching the flight data flash log here in hope that someone could help me determine what went wrong. Before the quad ‘got mad’ everything seems OK and vibrations are acceptable; after that point they go to extreme levels.
Many thanks in advance for any help.
 At least defender showed the correct name of the file. Hence my warning.
At least defender showed the correct name of the file. Hence my warning.

{kind=link}
{kind=link}
{kind=link}