I’d really appreciate some help analyzing a crash that happened with my drone setup today. Here are the details of the build:
Motors: Tarot 4008 330KV
Frame: 51cm x 51cm (700-class series)
Battery: Tattu 16000mAh LiPo 15C
ESC: 40A 4-in-1 ESC (DShot600)
Flight Controller: Orange Cube
Propellers: 17-inch
Total Weight: 3.5 kg
The drone was flying perfectly for almost 17 minutes, including extended periods at 121 meters altitude. However, it suddenly fell from a height of around 60 meters and crashed. There were no apparent signs of instability or issues before the fall.
After hours of analyzing the log, I couldn’t pinpoint a clear reason for the crash due to my limited expertise. I suspect it might have been an ESC desync issue, but I’m not sure.
I’ve attached the log file below. If anyone could help me analyze it and figure out what caused this sudden and catastrophic failure, I’d be extremely grateful.
thanks allister for your time , you are absolutely right found out later after running motor test , motor 4 was not working and found out coil burned , strange because esc is working fine but i think might their was no lubracation between shaft and outrunner or some manufacturing defect, image attached below
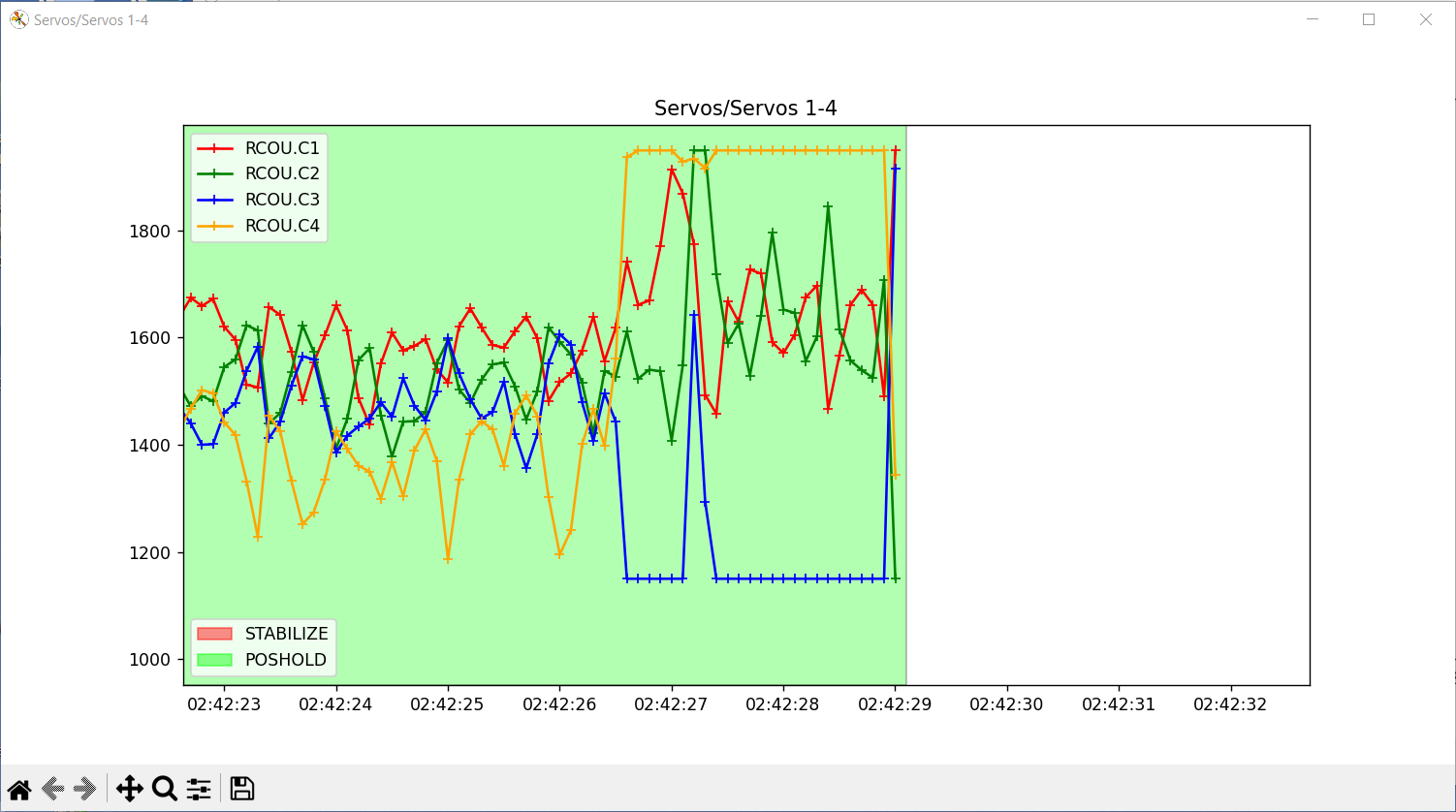
That motor was actually hitting minimum output quite a lot, so it was the motor with the least load and least likely to burn out - so carefully check the rest, it’s a wonder they didnt all burn out.
I believe the underlying issue is oscillations.
When you get it going again, fly for only a minute or so then land and check the motor temperatures. Reduce the ATC_RAT_PIT_D and ATC_RAT_RLL_D by about 10% until the heating goes away.
As soon as possible move on to actual tuning, possibly by running the VTOL Quicktune script if your OK with getting that organised, or come back for more information when you get the copter working again. Do not do long flights without checking the logs for oscillations and checking the motor temperatures.
The DSHOT is not working as expected (although the 4in1 ESC is likely doing what it should). You will need to set these at least:
Thank you for your reply. I will strictly follow the steps you mentioned.
I have a few clarifications:
1. In the situation you described, oscillations can be caused either by vibrations or by incorrect PID tuning. Based on the VIBE graphs, do the vibration levels look acceptable to you? (I understand that typically vibrations below 30 m/s² are considered acceptable for ArduPilot.or it was just pid .
2. Regarding DSHOT — I had already set DSHOT600 through the ESC Calibration page, and also set the PWM Type to DSHOT. Of course, I understand that a 4-in-1 ESC usually does not require manual ESC calibration. However, if DSHOT was not functioning correctly, which other protocol would it have likely fallen back to? (PWM, Oneshot125, Multishot?)
3. For autotuning, are you referring to the documentation here:
I just want to confirm before proceeding.
Also, if there are any other important points or checks I might be missing at this stage (especially related to PID tuning, vibration isolation, ESC configuration, or safe testing procedures), I would appreciate your advice.
DSHOT requires a few more setting than just selecting it in MOT_PWM_TYPE escpecially for a Cube Orange using the Main outputs (IO MCU). The fallback is PWM.
Autotune is certainly the aim. There are a few steps prior to ensure Autotune gives a good result, such as setting up the harmonic notch filter. There’s more documentation and many more steps, but wait…
QAUTOTUNE for Planes is not what you want, it’s VTOL Quicktune:
The VTOL QuickTune takes a little bit to set up, however you might not need it though. Get everything working and do a short hover flight to check motors.
Set these before that flight too:
thanks shawn for your time and answering doubts , will definitley follow procedure you mentioned and will soon post the results after flight , ordered a few new motors , will fly as arrived
thanks for support

")