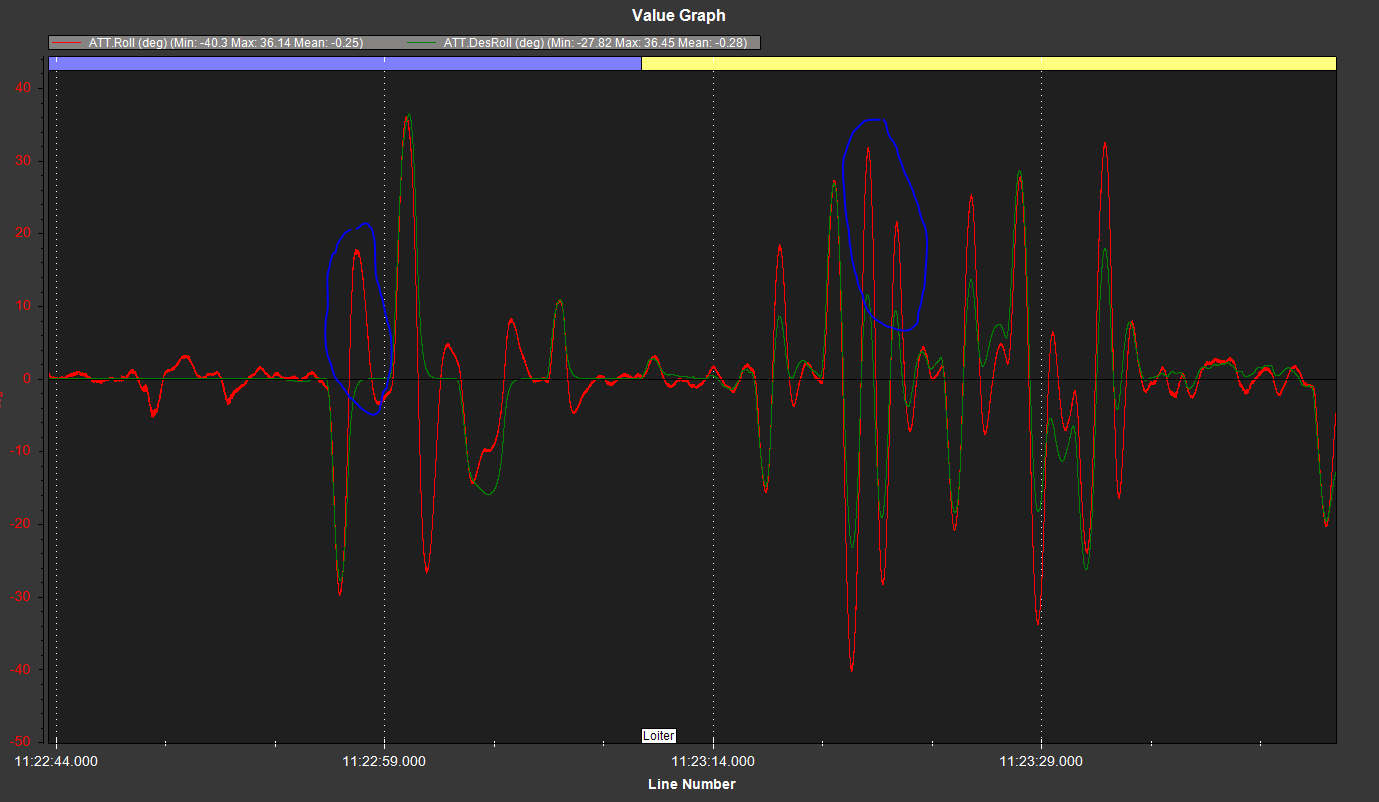
After following the above steps, autotune of Roll & Pitch axis was done successfully in separate flights. In next flight pitch input was applied to test copter response in LOITER mode and copter tried to recover its attitude but failed, went into oscillation and CRASHED!
I don’t have the video of flight but all the props were on the frame after the crash and no prop came off during flight.
The first pitch was applied by myself and copter tried to recover itself but went into oscillations and crashed. I think so there might be some problem with the PID gains after auto tune.
After roll and pitch auto tune, conducted a little test flight. The auto tune performance was not as it should be because there are significant overshoots.
Hello All, Can anyone please look into the above log to evaluate the Autotune and possibly point out the cause of crash. I am really stuck at the moment:(
Hello Leonard Hall, Thank you for looking into it. The Autotune & Crash logs are here: Logs - Google Drive
The last posted link is of a test flight after Autotune (before the eventual crash) mostly in AltHold and that will help analyze the Autotune performance: test_flight_AAT.bin - Google Drive
I have installed fresh set of props an Looking forward to your valuable assessment and recommendation for next flight. Thanks a bunch
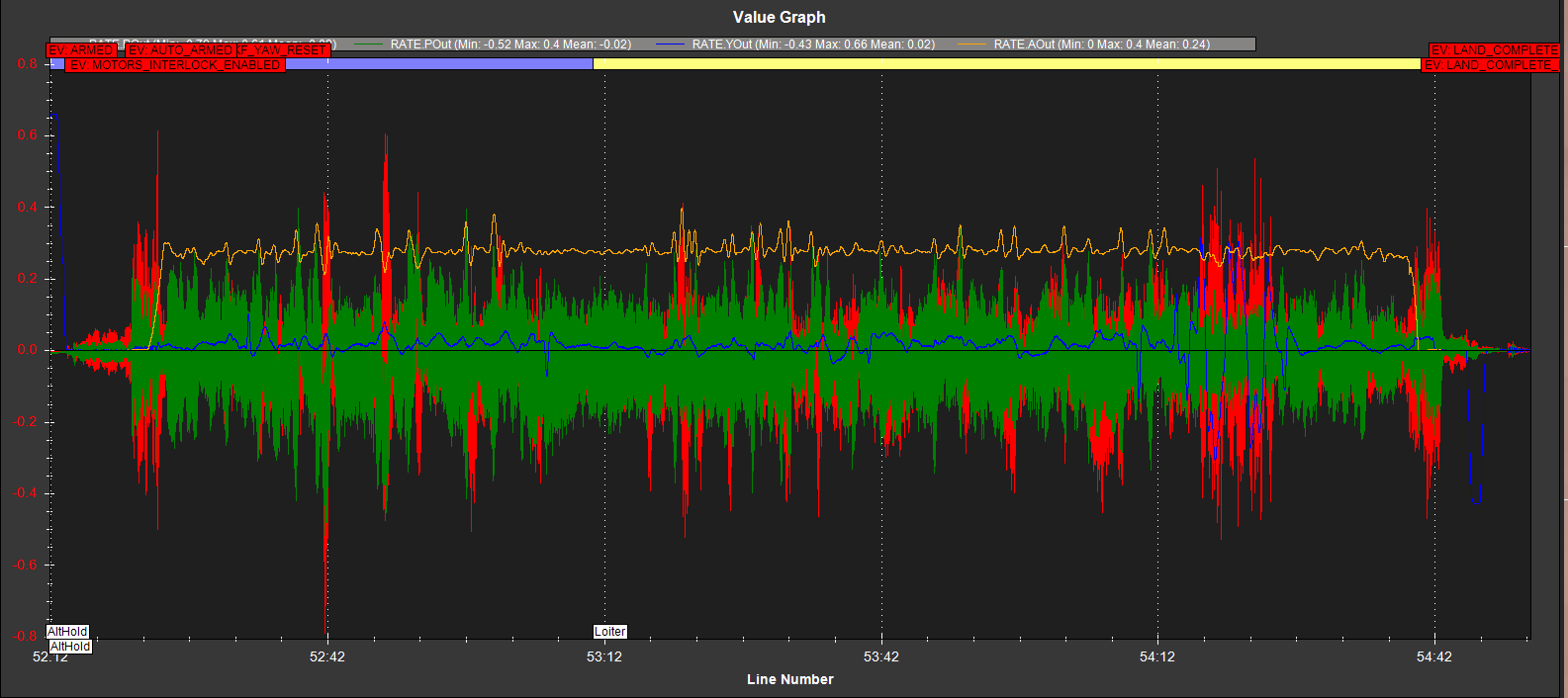
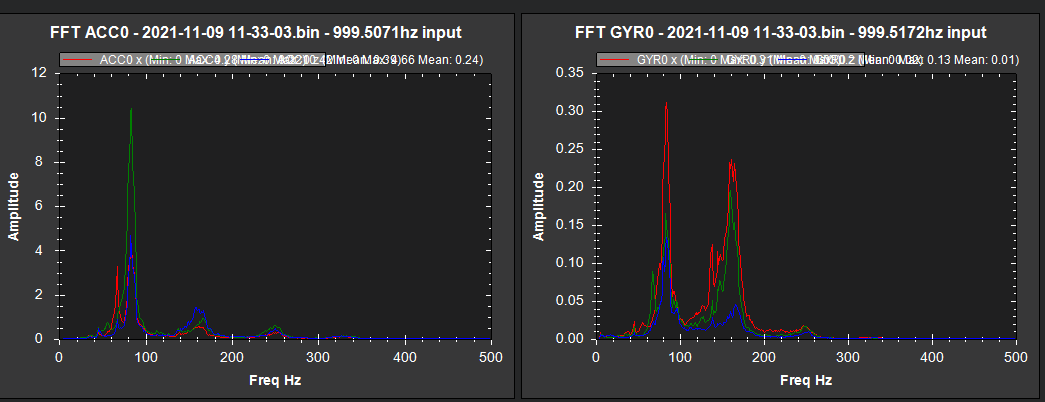
logging is set too slow for me to see exactly what happens during the crash but there is again a huge amount of noise. Your harmonic notch looks like it is way off. I would check that again.
Sorry for many questions here but i am trying to learn from your experience. Can you please confirm if it is necessary or recommended to change ATC_RAT_RLL_FLTT & ATC_RAT_PIT_FLTT to ZERO when conducting the Autotune? I found this recommendation from @andyp1per here:
It would be great help to include this instruction in Autotune Documentation if this is the proper way.
I followed Tuning Process Instructions — Copter documentation and the FLTT values were set to 20 when Autotune was performed. I did not set FLTT to 0 for Autotune. Could this be the reason for a bad tune and a contributing factor for the crash?
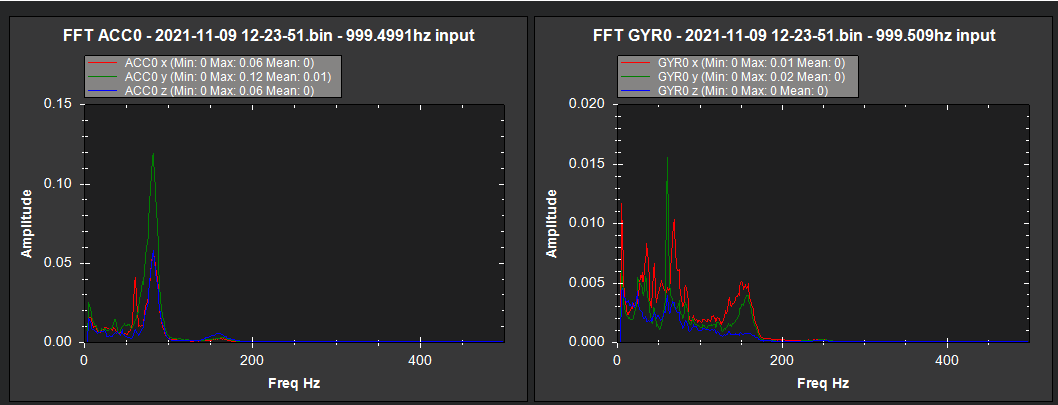
Also The magnitude of Gyro noise as per the Post Filter FFT plot is really small. Can you please point towards another parameter to look at for the amount of noise instead of FFT Magnitude?