I am new to the ardupilot and I have built a quadcopter using pixhawk 2.4.8. After setting up everything correctly, I tried setting PID for basic tunning. I got better stability in Althold mode when I was flying. After some time when I again took takeoff, the drone drifted in a direction and EKF error showed. this happened 2 times. I have shared the log and video of incident below.
Altitude hold mode will drift with the wind. It will not stay in one location if it’s windy, and in the video you can see the trees moving. (It doesn’t take a lot to get drone moving quick). The pilot must make inputs to maintain the position of the drone and offset any wind.
Check that all the propellers are installed in the right direction. It flew so they must be turning the right way, but I wonder if they are working as they should. There’s also very high vibration, higher than I would normally expect even on an F450 frame, so I think something is physically wrong with at least one of your motors/propellers.
Regarding your configuration I suggest you follow the links provided by @amilcarlucas. Reset to defaults and use the configurator.
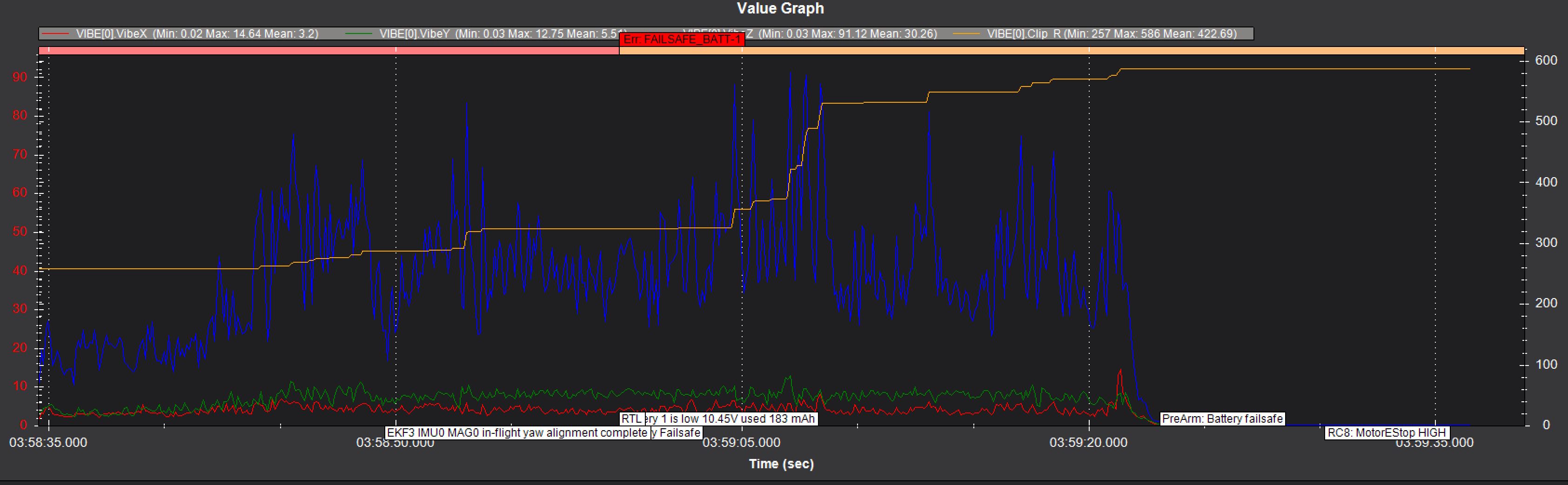
The vehicle entered EKF failsafe due to high vibration (FAILSAFE_VIBE flag), velocity and position variances reached 5! it supposed not to exceed 0.5 in normal situations. The vibration in Z axis exceeded 100 right after takeoff so you can also check your autopilot mounting. This flight was almost 5 sec flight so you can consider sharing the mentioned althold flight log for further support.
I am making a quadcopter drone. After calibration, I took a flight. During the first flight, the drone automatically went upward in Alt Hold mode. After that, I tried Loiter mode, but in Loiter mode, the drone also went upward automatically. These automatic spikes occurred in the drone without any changes in throttle.
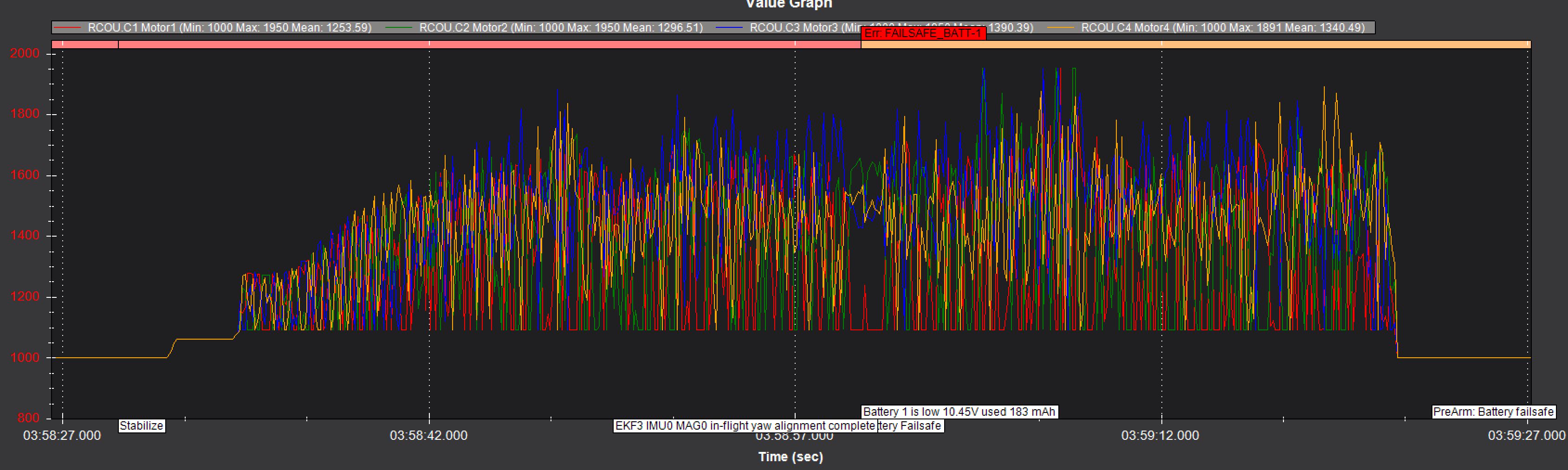
You won’t get far with vibrations levels, including clipping events, that high. And there is massive output oscillation.
You have made zero progress in 12 days.
Got any of this stuff on that craft? Hardware to avoid
I am using Pixhawk 2.4.8 FC, Motors and Frame from the list. As of now, I dont have any option to change the hardware. I tried to change ESC and ruled out the faulty ESC problem. Also I made 3 drone using same hardware which are working great for illustration of drone working. I am following the same procedure for this drone also but the drone suddenly increases throttle even throttle stick is below 50.
I just want this drone to be stable in AltHold Mode and Loiter Mode. I know the hardware is not as required for the best flight experiance but I have to use them now. The other 3 drones are hovering well using same params, only this one got the problem.