I’d like to have a quadcopter to fly indoor stably so Cartographer laser SLAM is selected for indoor localization.
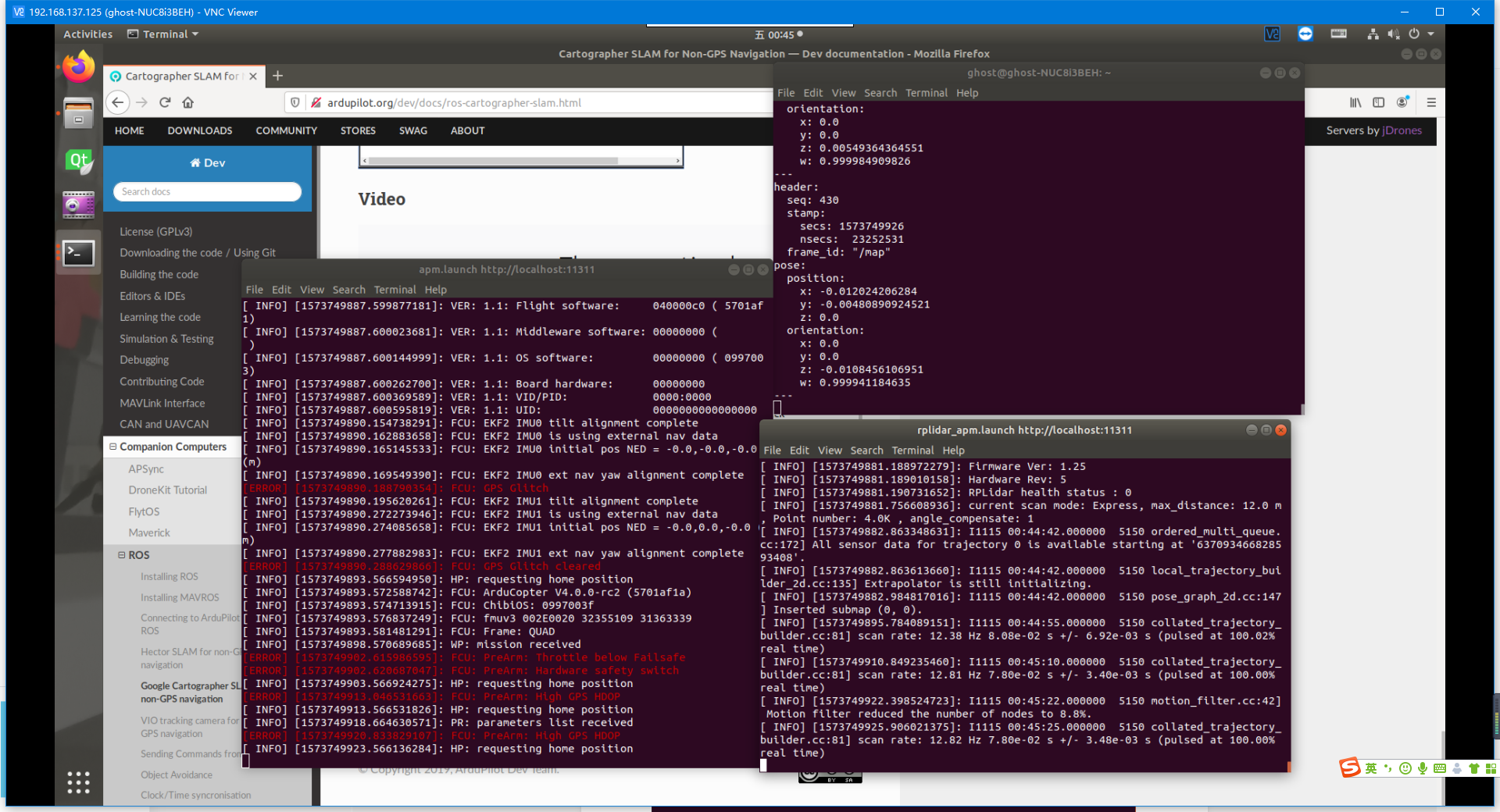
I take this article in ardupilot wiki for reference and do exactly as it says.
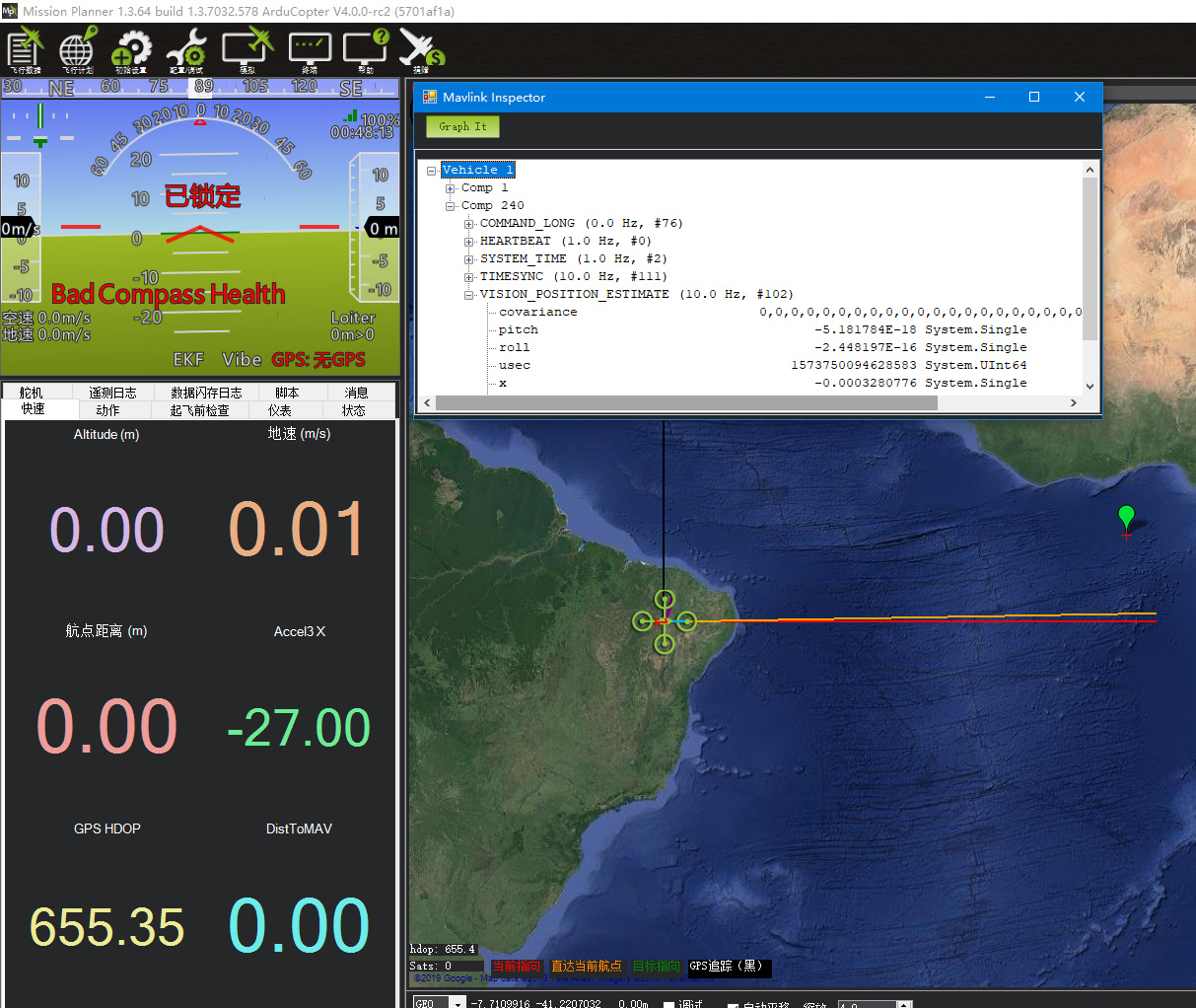
Finally the data is collected but the quad cannot arm due to HIGH GPS HDOP both in Loiter mode and Poshold mode
The value of GPS_HDOP is 655.35.
The quad is tunned for outdoor flight and most of parameters are default expect for those set in calibrations and companion link. Then the parameters are modified as the ardupilot wiki says.
- Baud for telem2 (to companion computer) 500000, which is not 921600 for not accepting by the USB-to-UART converter
- AHRS_EKF_TYPE = 2
- EK2_ENABLE = 1
- EK3_ENABLE = 0
- GPS_TYPE = 0
- EK2_GPS_TYPE = 3
- COMPASS_USE = 0, COMPASS_USE2 = 0, COMPASS_USE3 = 0
- MAG_ENABLE = 0, this option does not exist
What should I do now?
BTW, why there is still BAD compass health after disabling the compasses in parameter list?
It would be very grateful if someone helps!
Version
AdruCopter V 4.0.0-rc2 (beta version when choosing Firmware these days)
Platform
[ ] All
[ ] AntennaTracker
[ X ] Copter
[ ] Plane
[ ] Rover
[ ] Submarine
Airframe type
quad X frame with tip-to-tip length of 450mm
the quad never takes off when fixing this issue
Hardware type
- Autopilot
Pixraptor 2.1
It is a modified pixhawk 2, which is shown Px4fmu-v3 in MAVROS - Companion computer
Intel NUC with i3-8 CPU
OS: Ubuntu 18.04 LTS