Guys please take it with a grain of salt as I am not an expert and trying to figure out the values.
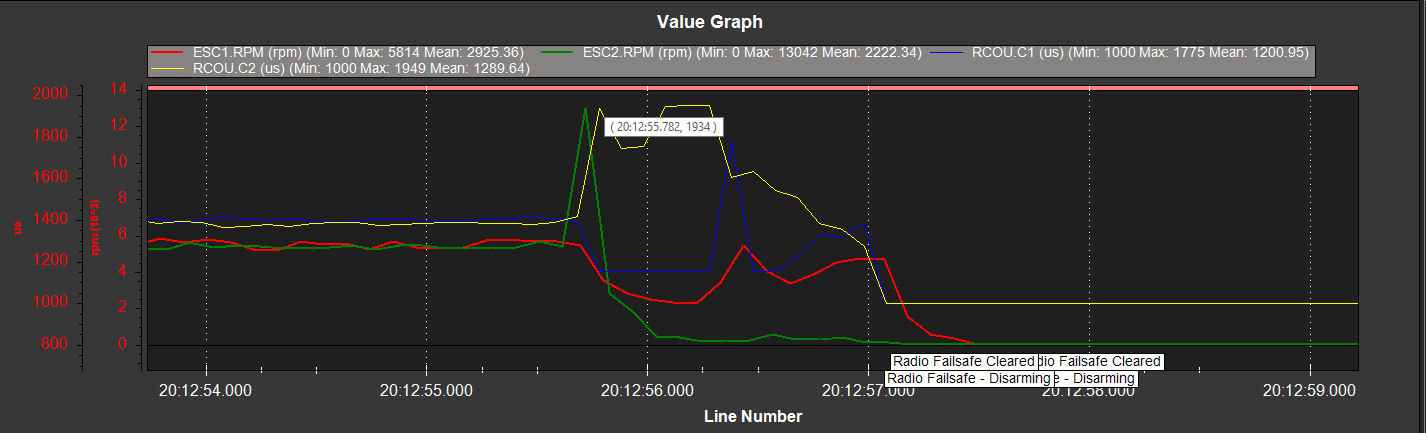
I am wondering if its a desync issue and motor2 going full power then why RCOU.C2 is also going up? Looks like RCOU.C2 and motor 2 RPM went high almost at the same time and it looks motor 2 was commanded to go full power by the FC. I couldn’t find where Motor RPM’s shoot up without the command from FC.Does it make sense? Thanks.
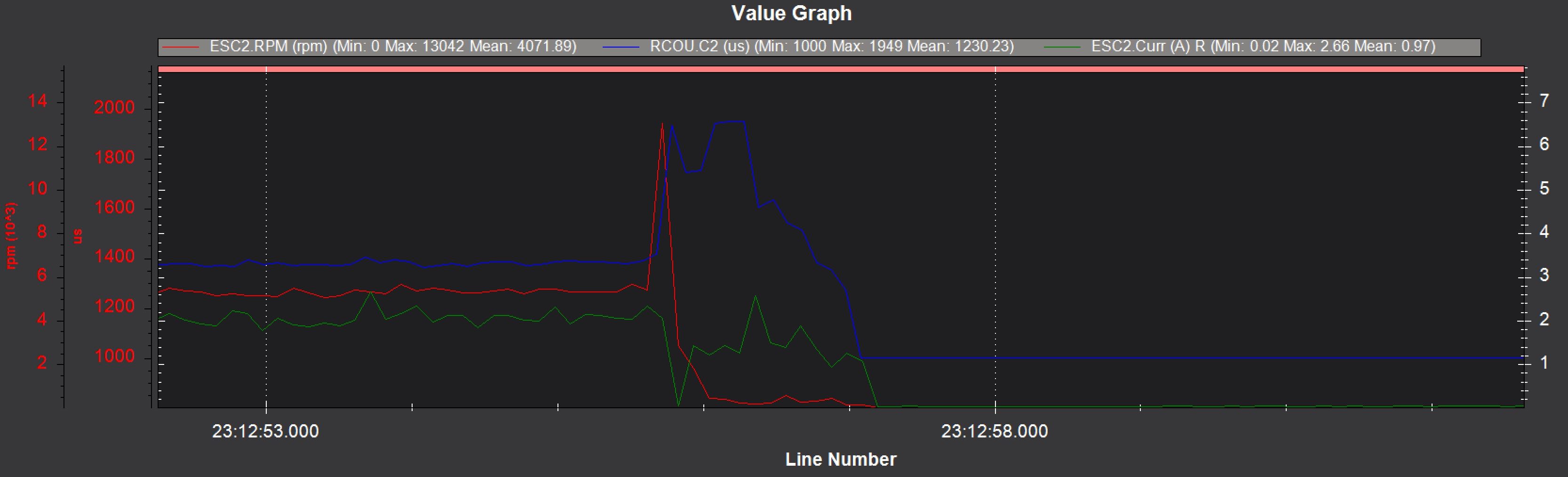
Yea, I’m wondering about that too. Here we see RCout2 commanded high with an increase in RPM but a drop in current. So it seems it was losing thrust (current from torque). Did a prop break?
Here is a question; if a motor de-syncs will ESC RPM from telemetry show a drop? I don’t know the answer, perhaps not.
I’m pretty sure the telemetry will show zero if the motor is not spinning, it makes all my testing a pain because I have to attach motors to everything for it to be a valid test
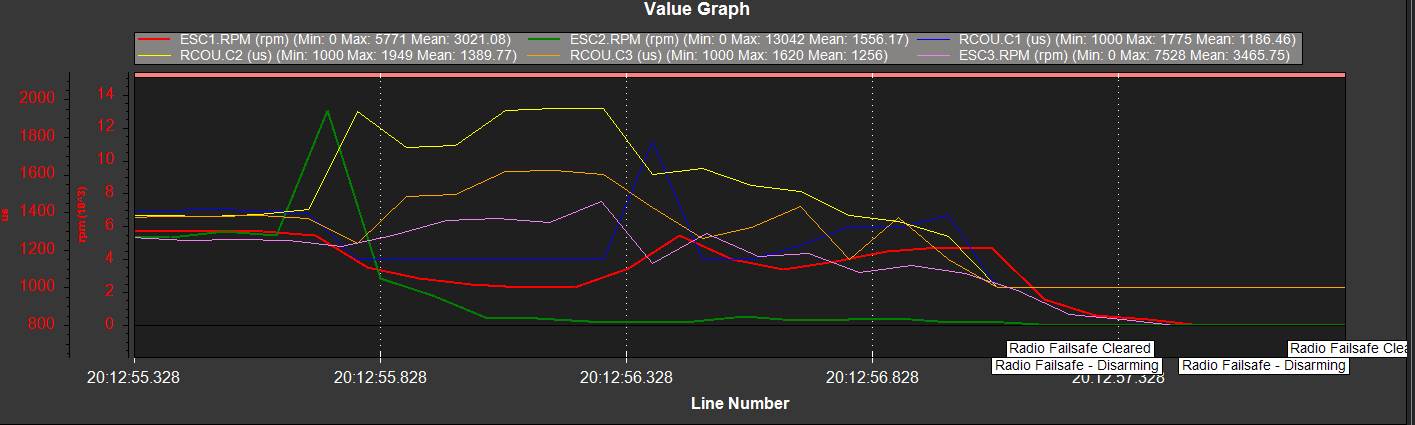
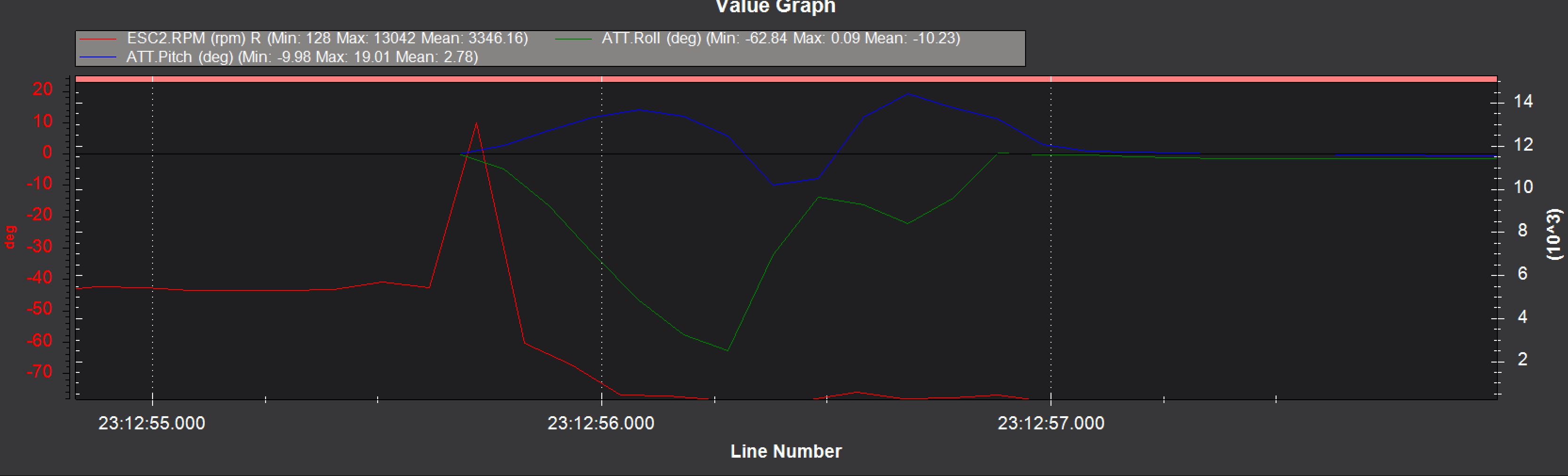
@dkemxr Everything makes sense only if the RPM value of Motor 2 is not right. So In reality, Motor 2 desynced, lost thrust, current dropped and that’s why FC is commanding full PWM. Can we check by ATT from the log that which corner dropped first?
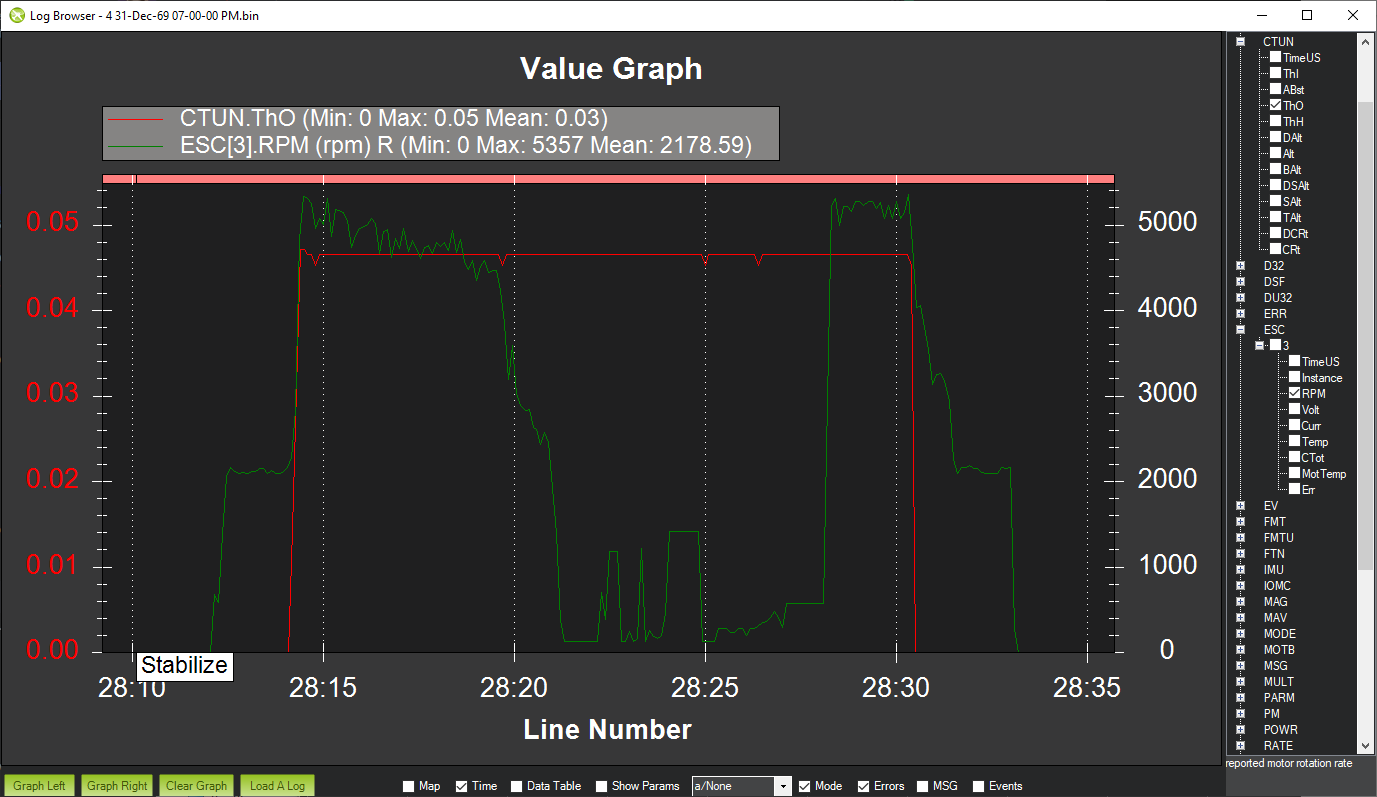
I did a test of this on the bench with expendable parts. I locked the motor shaft from rotating with the ever useful Vice Grips and throttled up while logging. Some aweful sounds were coming out of the motor but it wasn’t rotating. Check out the ESC RPM in the log. 3 31-Dec-69 07-00-00 PM.bin (581.1 KB)
Changed the log the previous didn’t show any throttle input.
So when the motor is stopped, RPM telemetry is useless.Your graph shows its turning at 9628 RPMs when its stalled. Now the question is how accurate is it when motors are turning?
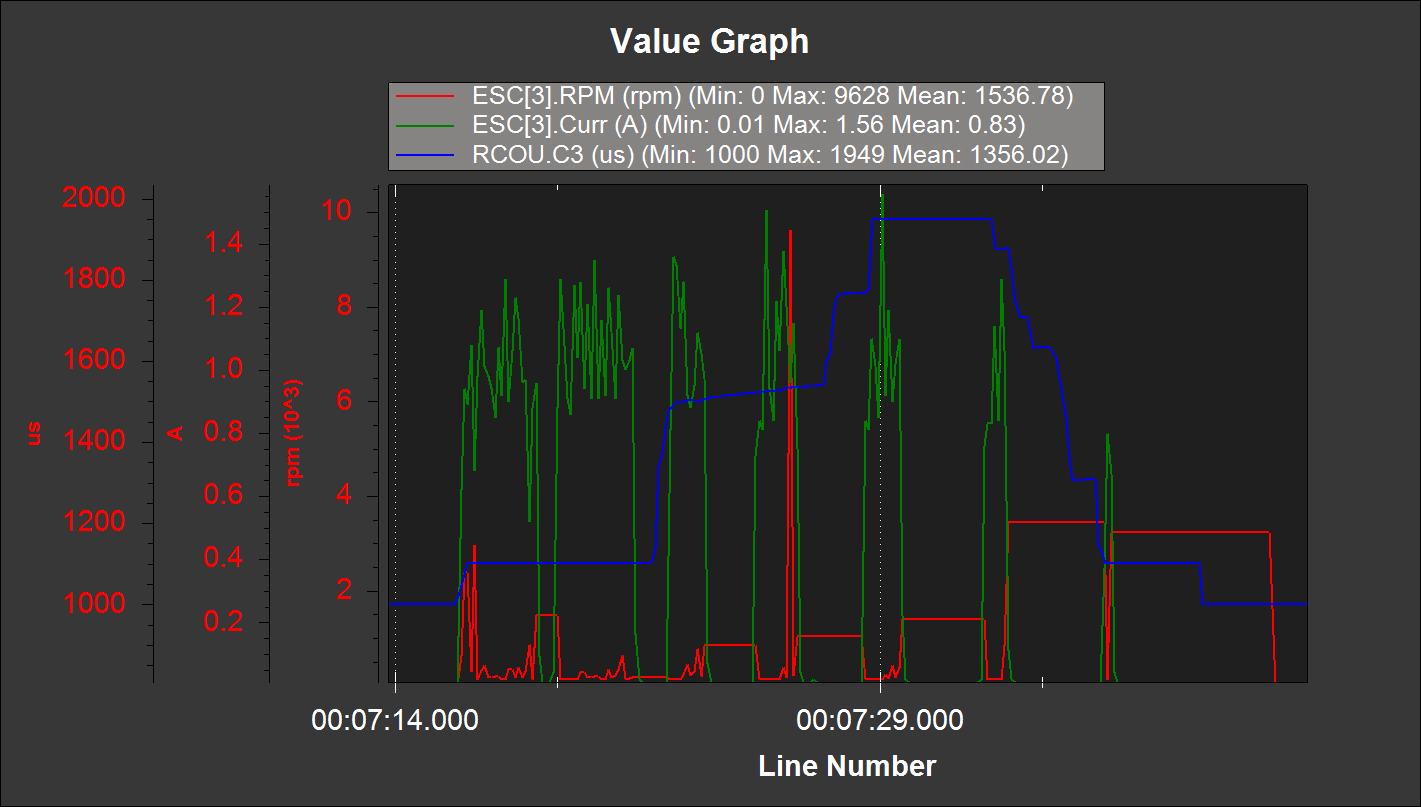
Here is a similar test but this time the motor was throttled up and running free and I slowed it to a stall with a strap wrench. If you plot RPM, Current and RCINC3 you can see where it stalls and then a “de-sync” section and then free rotation again.
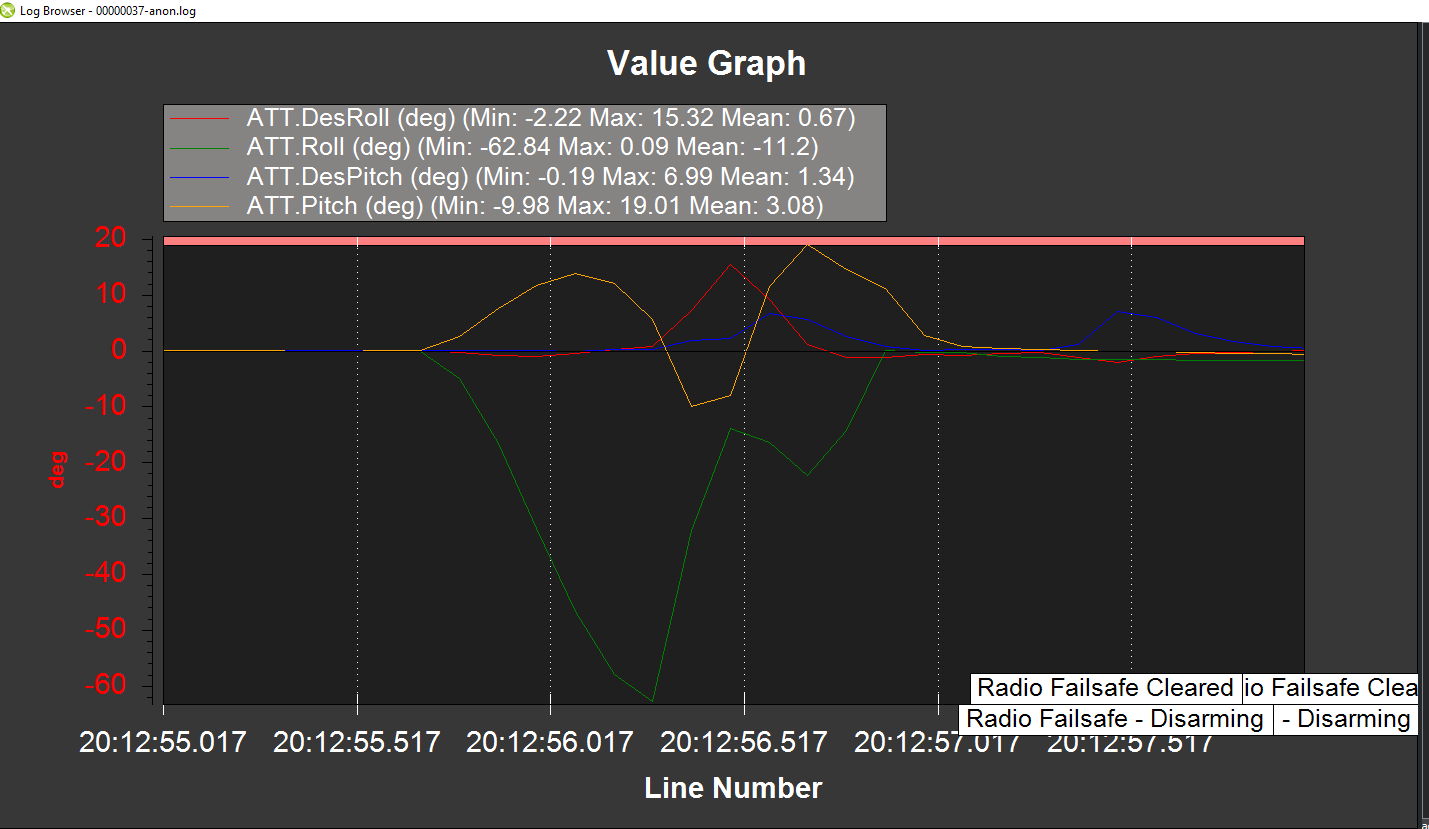
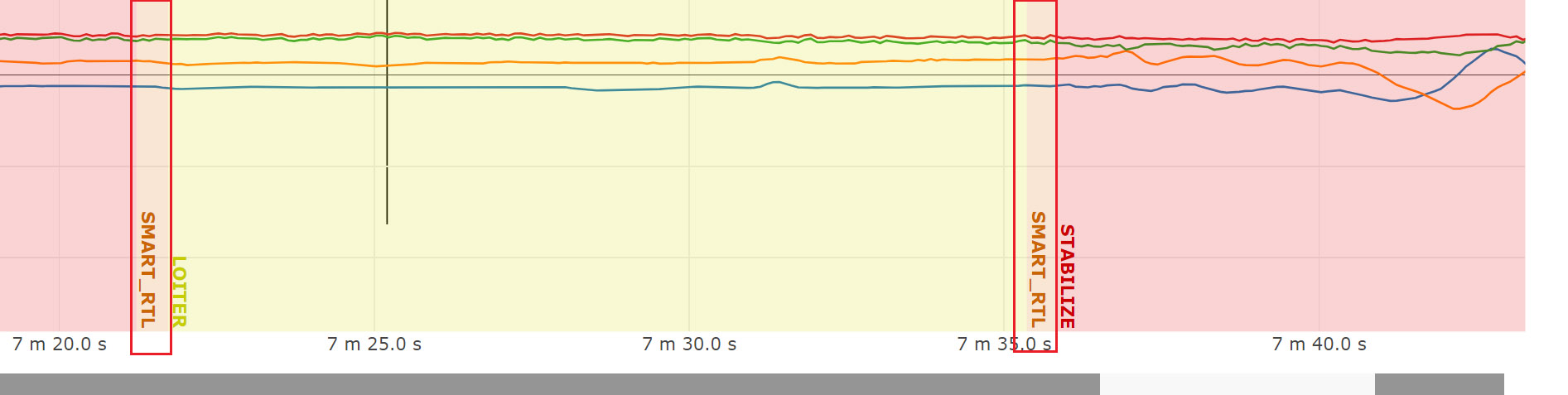
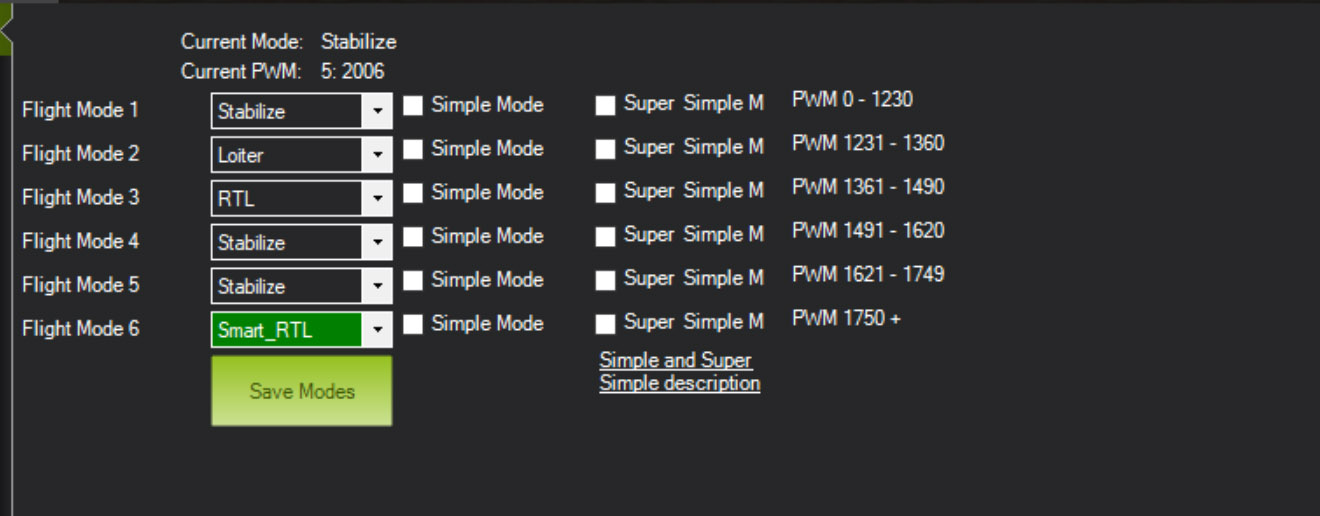
Crash log: My radio is set to have more that three fight modes but i need to engage a switch to get all of them does this look tike the radio is sending a bad command before and after loiter see image.
Thanks for this testing. So I guess this shows that BLHeli ESC RPM values work OK with the possible exception being that they show slightly unrealistically high numbers when the motor is externally stopped. So for example the ESC.RPM value jumps around between 100 and 1400 when really the motor is stopped.
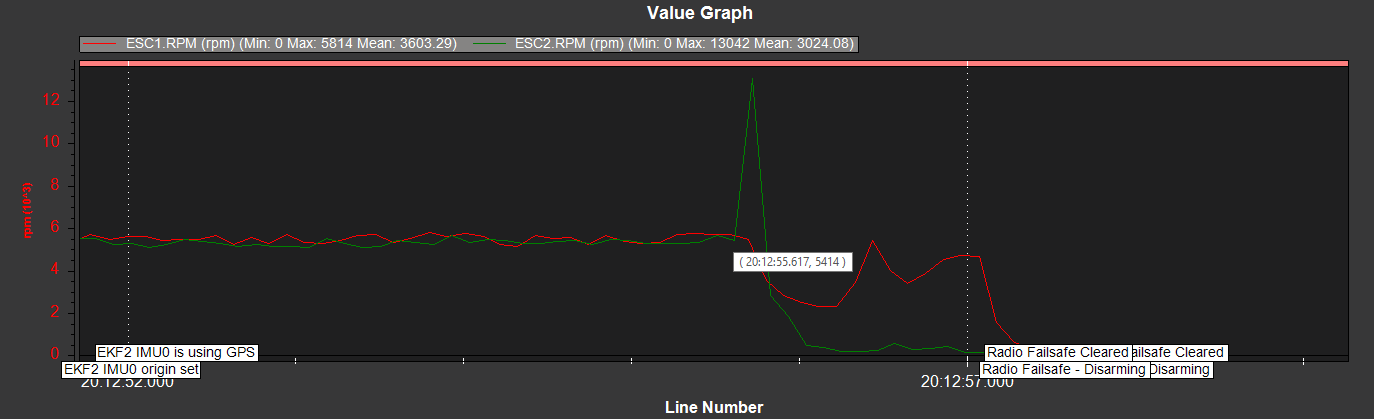
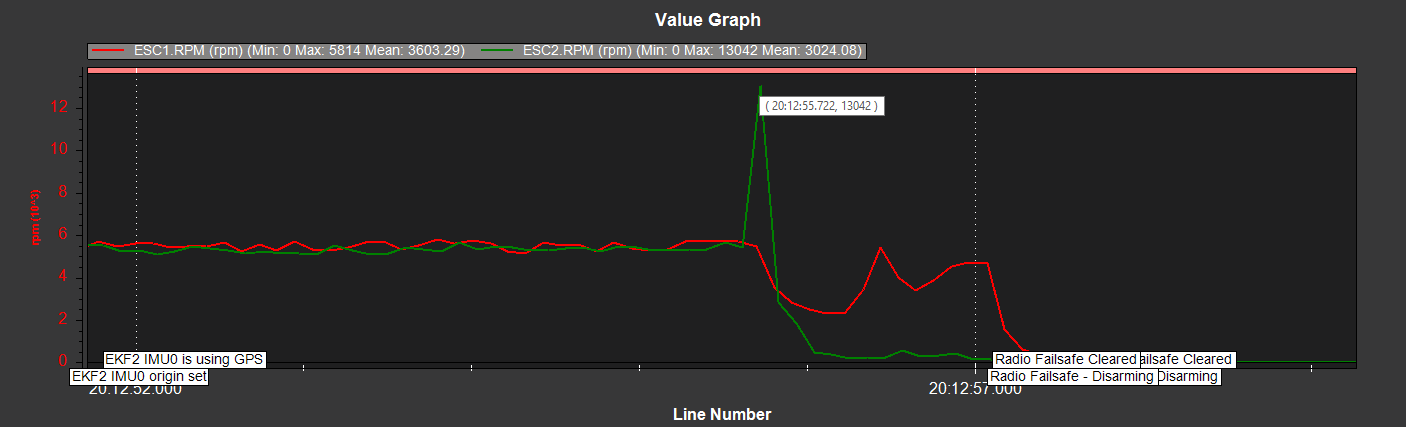
Below is dave’s log with the throttle shown in red (scale on the left) and ESC.RPM in green (scale on the right).
@rmackay9 I am sorry Randy for opening my thread in a wrong category. My Bad…
And thanks for everyone for the suggestions. So it was the bad rear left ESC. It finally gave up on my next flight. Luckily close to the ground. Now when i try to run , motor behaves exactly like motor missing a phase. So new ESC is on the way.