I was hovering my quad indoors and all of sudden it tilted to the left and hit floor.I flew this quad before on 4S and never had issue since i built it last month.But now i tested on 6S @ storage level. Motors are genuine DJI phantom 4 pro motors and ESCs are Tekko32 F3.
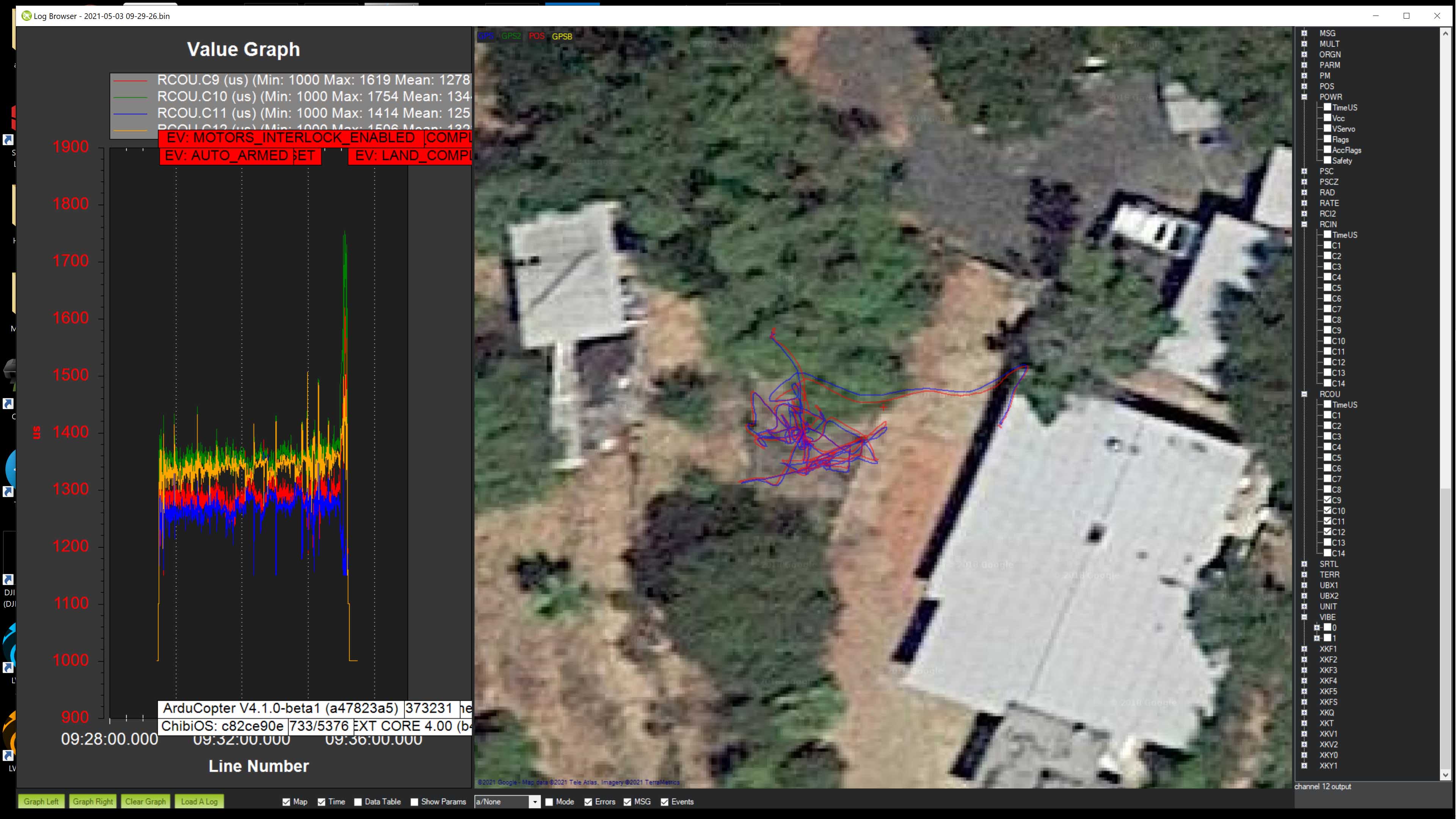
I tried to review the log but i could spot anything except Motor no.2 RPMs are shooting up.I don’t have expertise to review it properly. Still learning.
Could anyone please have a look at my log? Thanks.
So did it happen due to using 6S?I just want to make sure that it didn’t happen due to any ESC issue.If that’s the case then I can send ESCs back for warranty.
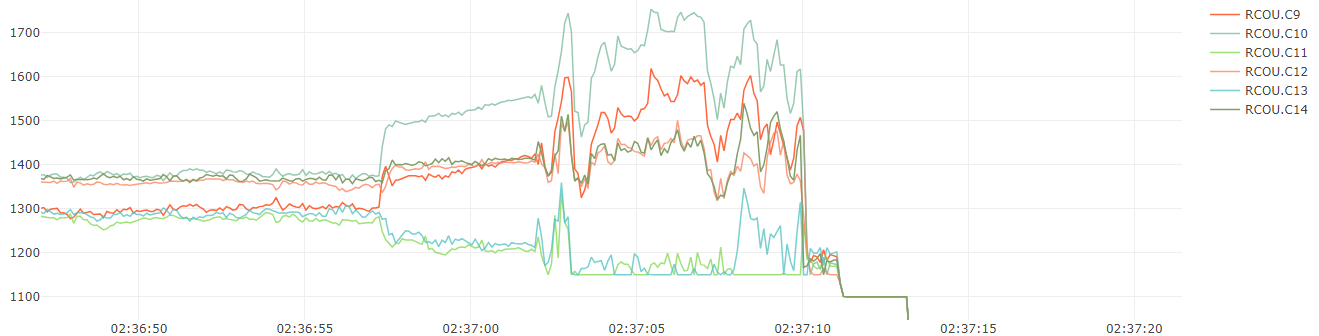
I had a quick look at your logs but your analysis that something went wrong with motor 2 seems correct to me. It shows the classic symptoms of a motor/esc failure for motor2:
motor 2 (back left) spikes to maximum and its opposite (motor 1) goes to minimum
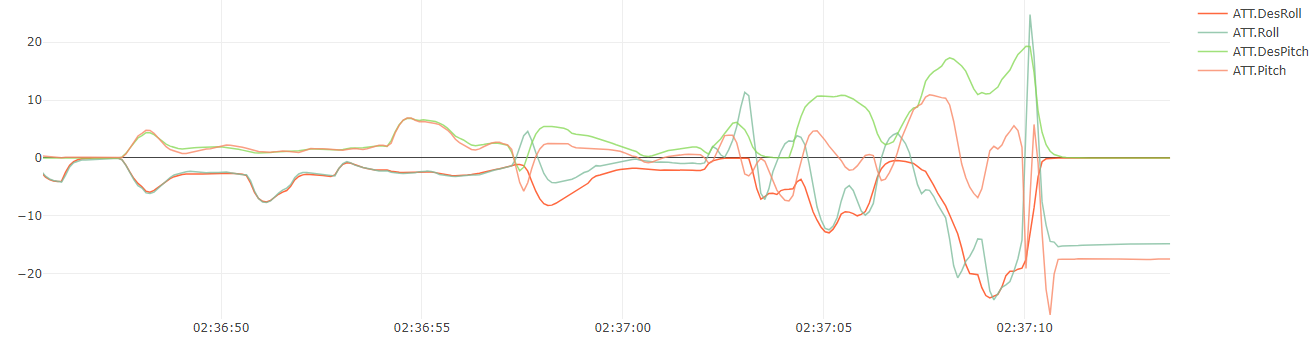
the vehicle leans towards the suspect motor with the high output (motor2). In this case the vehicle rolls left and pitches back.
desired and actual attitude angles are find an then suddenly diverge at the moment the motor output goes high
From the MOT_PWM_TYPE parameter (4) it looks like this vehicle is using DShot 150 and the board is a KakuteF7.
If this was 4.0.7 I would definitely conclude that this is a motor/ESC failure especially considering this is the first time you’re testing with 6S (I assume the ESCs and motors can handle this?) but I will check with the other developers before making that conclusion.
Actually I have a single 1000uf 25V Low esr cap at the battery input. But I was running 6S @ storage level. So batt volts were 22.5 when this incident happened.
This was just a 6S test and this quad is intended to run on 4S.I just tested to get a feel on 6S as my electronics support 6S except this 25V cap. That’s why i was running at storage charge.
Motor outputs change at the same time, not exactly like a failure, they still seem to be responding but outputs 9 and 10 are affected the most - maybe a desync??
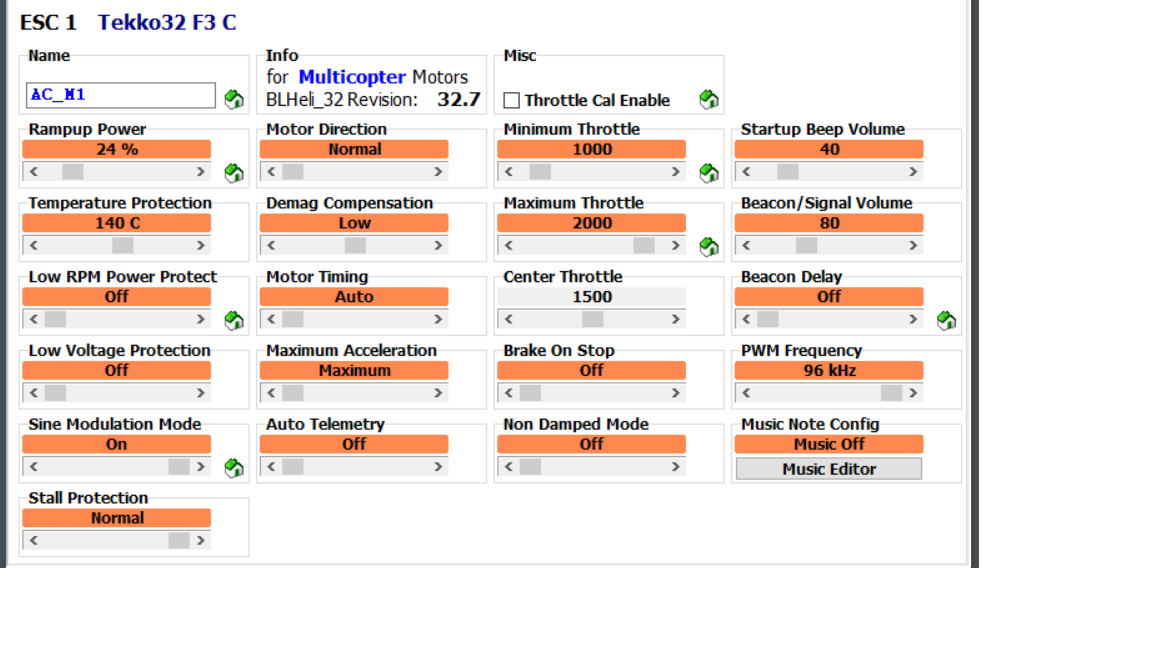
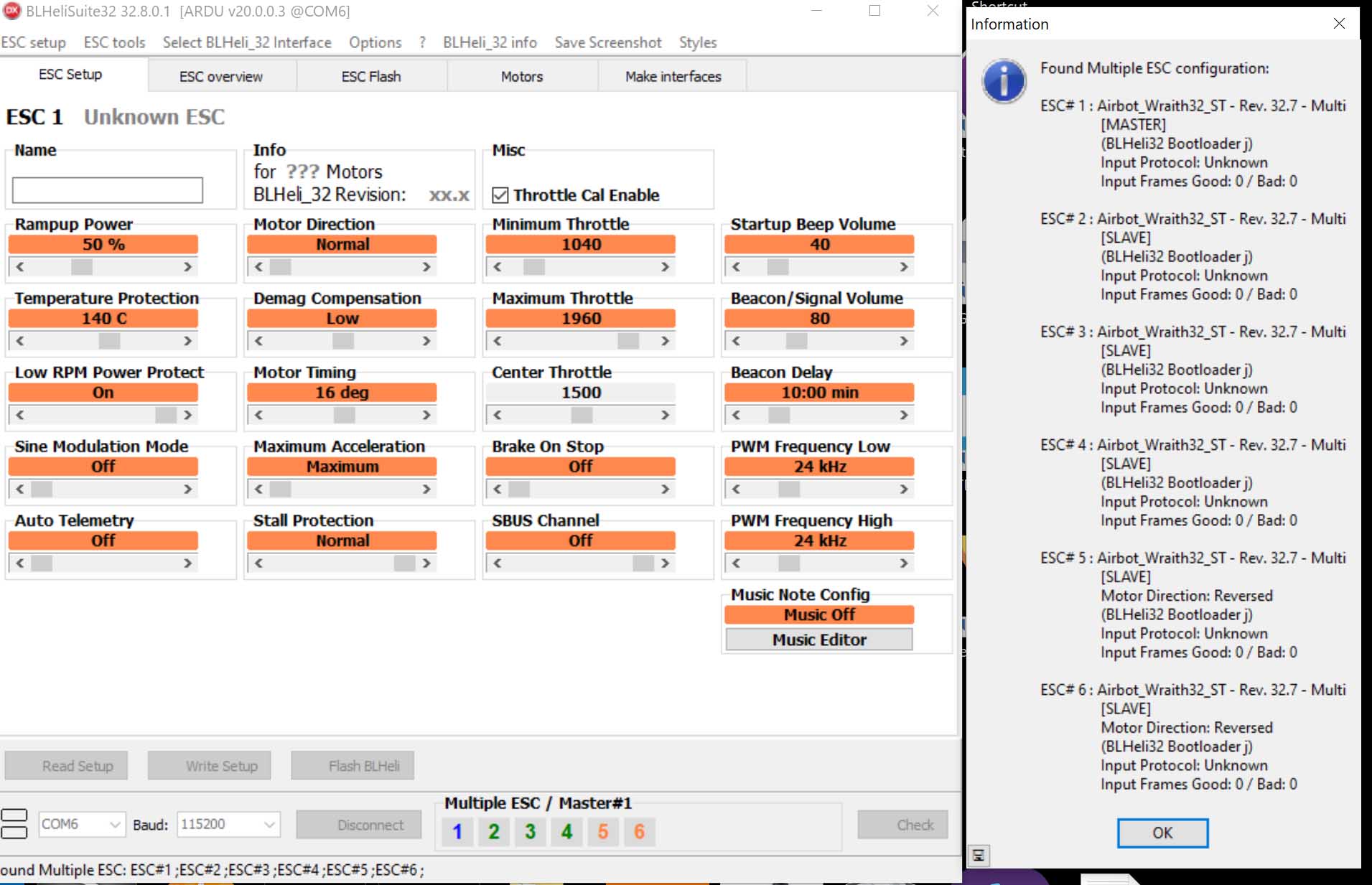
What BLHELI settings are you using?
Outputs are generally a touch on the low side when operating normally, you might need to add a bit of dummy payload.
And plug in those MOT_BAT settings
Definitely turn off Low RPM Power Protect and Low Voltage Protection, just ensure your other forms of voltage monitoring and failsafe actions are accurate and configured correctly.
I think with that size craft you’d be able to strap it down and play around with MissionPlanner motor test, or especially the BLHELI motor test function where you can set high/low throttle cycles. See if you get any desyncs.
Did a few changes as suggested and a few more settings like powerup.
Turned off Low RPM Power Protect and Low Voltage Protection.
changed demag to high, changed power up to 13
will use bigger battery or install the gopro 9
setup battery monitor and fencing.
As belt and braces it might be worth changing SERVO_DSHOT_RATE = 4 or even 5, this will run the dshot output rate at 4xloop rate = 1.6Khz which on an F7 is fine (assuming your loop rate is 400Hz).