Hi, i am trying to make my first quad-tailsitter and I have an issue.
While I try to do the first flight in QSTB mode the drone take off quickly to 1meter but I only move the throttle stick a little bit, it seem not normal, in copter when i do the same the copter only take off a little bit from the ground.
But the big problem is when my quad tailsitter is in the air and in QSTB mode it flip 180 degree in roll.
The hardware that i use is
FC: matek H743 slim
ESC: 35A hobbywing 4 in 1
GPS: matek m8q
And the coordinate axis i choose is follow the plane coordinate which perpendicular with the ground in quad phase.
below is the parameter
I also try in 2 different firmware version 4.2.0 and 4.3.2 but it have the same problem. I also check the direction of the motor it right at all
fixedwing.param (24.3 KB)
also need flight log
Hi, i redo the flight test and here is the log and final param, the drone flip again in roll
quad-tailsitter.param (24.3 KB)
The log file:
most likely you have set the motor assignments incorrectly for the frame type you have chosen
what autopilot output number is tied to which motor’s esc?
In my param the servo output is
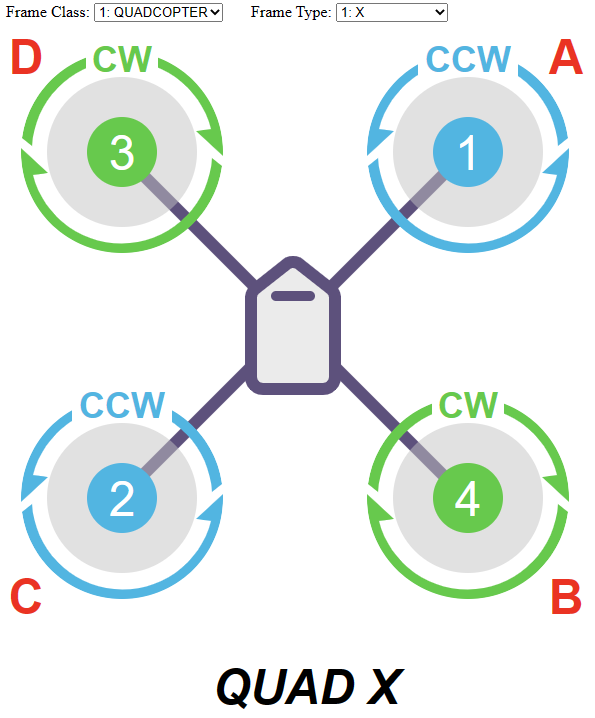
servo 1 - motor4
servo 2 - motor1
servo 3 - motor2
servo 4 - motor3
and i using motor test in setup tab the motor sequence is right follow ABCD in the image above
Here is clip of motor testing on sequence
what about your autopilot orientation and the AHRS_ORIENTATION param? that is the only other thing that could create a bad attitude response that I can think of…you have it set so that the its correct for fixed wing flying stance…ie the arrow is pointing straight up when in vtol stance
i flash new firmware and re-config by hand each param and suddenly its work and i don’t know how.
i think the function compare in mission planner cause the problem, i tried to flash new firmware then using compare to config. And today i try do it by hand, and the plane fly well.
I want to ask more about the emergency situation.
i used to make a normal quad-plane with 4 hover motor and 1 thrust motor, I always set a Rc channel to switch flight mode to MANUAL in an emergency problem, that i can flight the quad-plane by hand.
But in this case, I don’t use any control surface, so I want to ask how the quad sitter actions when I switch mode to MANUAL, can’t I control it by hand. And are there any flight modes that I can use instead to control by hand to avoid crashing
fbwa in fixed wing mode or qstablize in VTOL allows direct pilot control
i have a problem that when i try to fly in qstablelize mode the plan can not take off and always flip like this clip.
then I reflash firmware and do the setup param again it can take off but only for the first time, the next after that it flip again.
video of the flip https://drive.google.com/file/d/1oE7LAVJKHYNS8YUxFlJ35NccnMXbOD5h/view?usp=drive_link
could any number of things…post a log