From the log it didn’t know it had landed. Switching to AltHold may not have done anything. There was a “Land Complete Maybe” message after you switched.
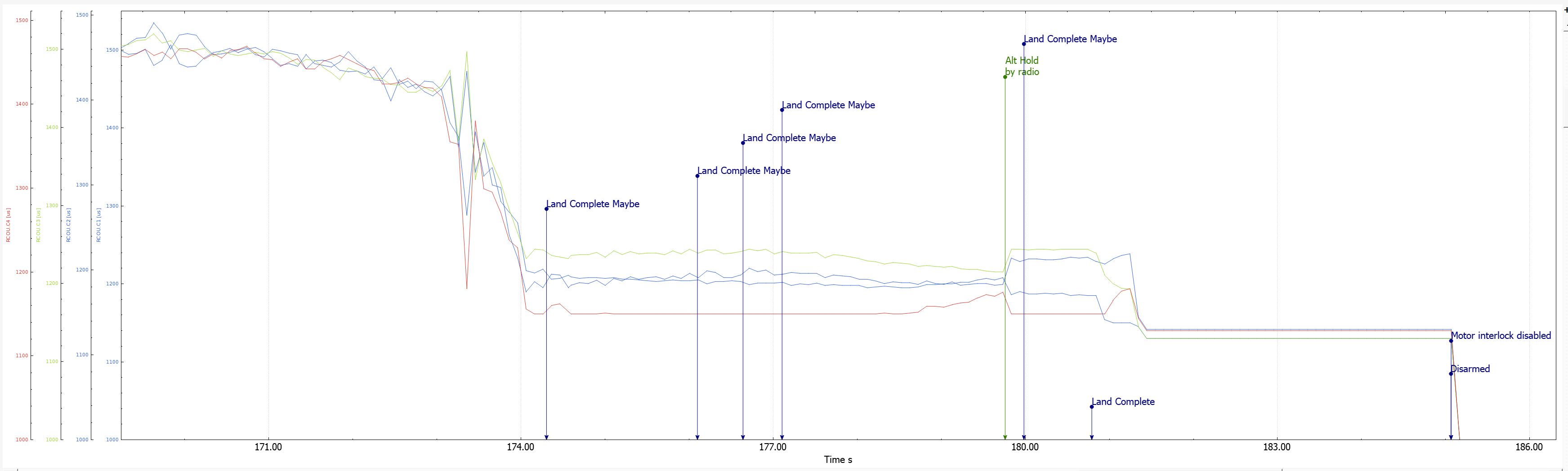
What’s issue then ? Any idea how to resolve this?
Nothing to resolve. Switch to Stabilize or land in Stabilize and disarm. Or just wait if in loiter.
what could be causing this any idea?
Hello, i have done a 5 min hover today the stability was pretty good. I am uploading the logs pls review them and tell is there still some room for improvement. Roll/Desired Roll and Pitch/Desired pitch seem little how increase D gain a bit more on the pitch and roll axis?
I have saved the angle_max to 20 degrees but this only works in loiter mode how make permeant for both altd and loiter modes ?
logs
https://drive.google.com/drive/folders/1NDa8DSdeIZ55UE6M_JPmT669rb_VjG4W?usp=sharing
Looks good.
LOIT_ANG_MAX
@dkemxr @xfacta
Hello, the copter is flying well but the imu miss-match is getting worse and the copter is not detecting landing is this related to the imu miss-match? in the latest flight, i have just increase loiter speed and max lean angle.
logs
https://drive.google.com/drive/folders/1Tdh_Dv9oTc-zj77IUHjX6FY8HEBBWBEs?usp=sharing
I think more tuning is needed. Better attitude control seems to feed into more reliable landing detection in my opinion.
What looks OK in the air can be deceiving, and in logs attitude control is still not good.
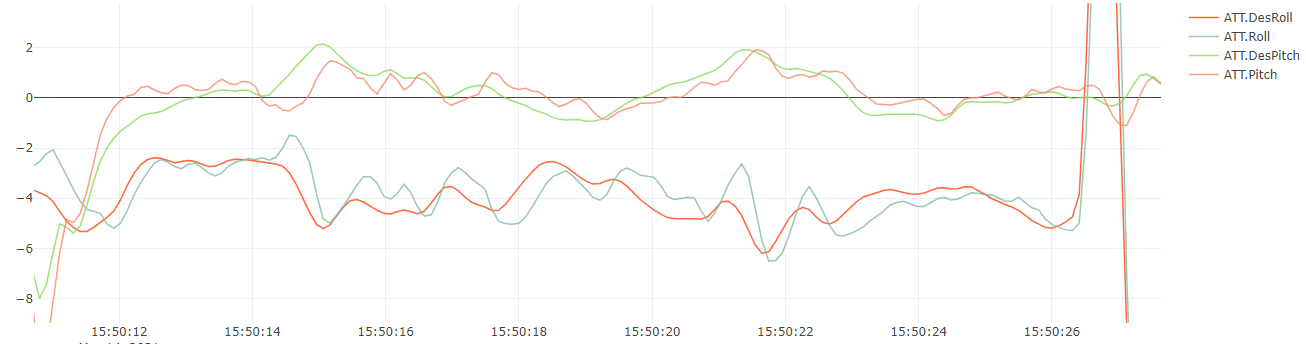
Motor 1 is working hard and motor 2 has reduced output indicating a weight imbalance.
MOT_THST_HOVER,0.168 or 0.17 is suspiciously close to MOT_SPIN_MIN,0.15
I would reduce MOT_SPIN_MIN and ARM a little, like MOT_SPIN_MIN,0.13 and MOT_SPIN_ARM,0.10 and restest flight.
If MOT_SPIN_ARM and MOT_SPIN_MIN cant be reduced then add a little weight so MOT_THST_HOVER goes up just a fraction.
I looked over the whole conversation briefly, and this is a recurring theme.
I would increase ATC_INPUT_TC a bit, like 0.2 for smoother RC feel, but that is more personal preference and doesn’t really affect the attitude control.
Run Autotune and let’s see what PIDs are calculated and how attitude control looks after that.
EDIT: you could try increasing INS_GYRO_FILTER to 30 or 40 since you seem to have small props.
Hello, thx Shawn for ur response i have increase the weight of the copter and done a small hover. I have also increase ins gyro filter to 30 but i want to know copter already have very low vibrations lvl will increasing the accl filter would help imu mismatch ?
LOGS
https://drive.google.com/drive/folders/1WiNSPmyFMiGm4nw5ihhEe38ho6wVWgNr?usp=sharing
You dont need to change the accel filter.
The best method will be to set up the Harmonic Notch filter, then run Autotune
@dkemxr @xfacta @andyp1per The notch filter is already enabled and if you see the FTT graph u can see the filter is working on the gyro graph but there is still a spike in the acc graph why so? vibrations lvls are very low also
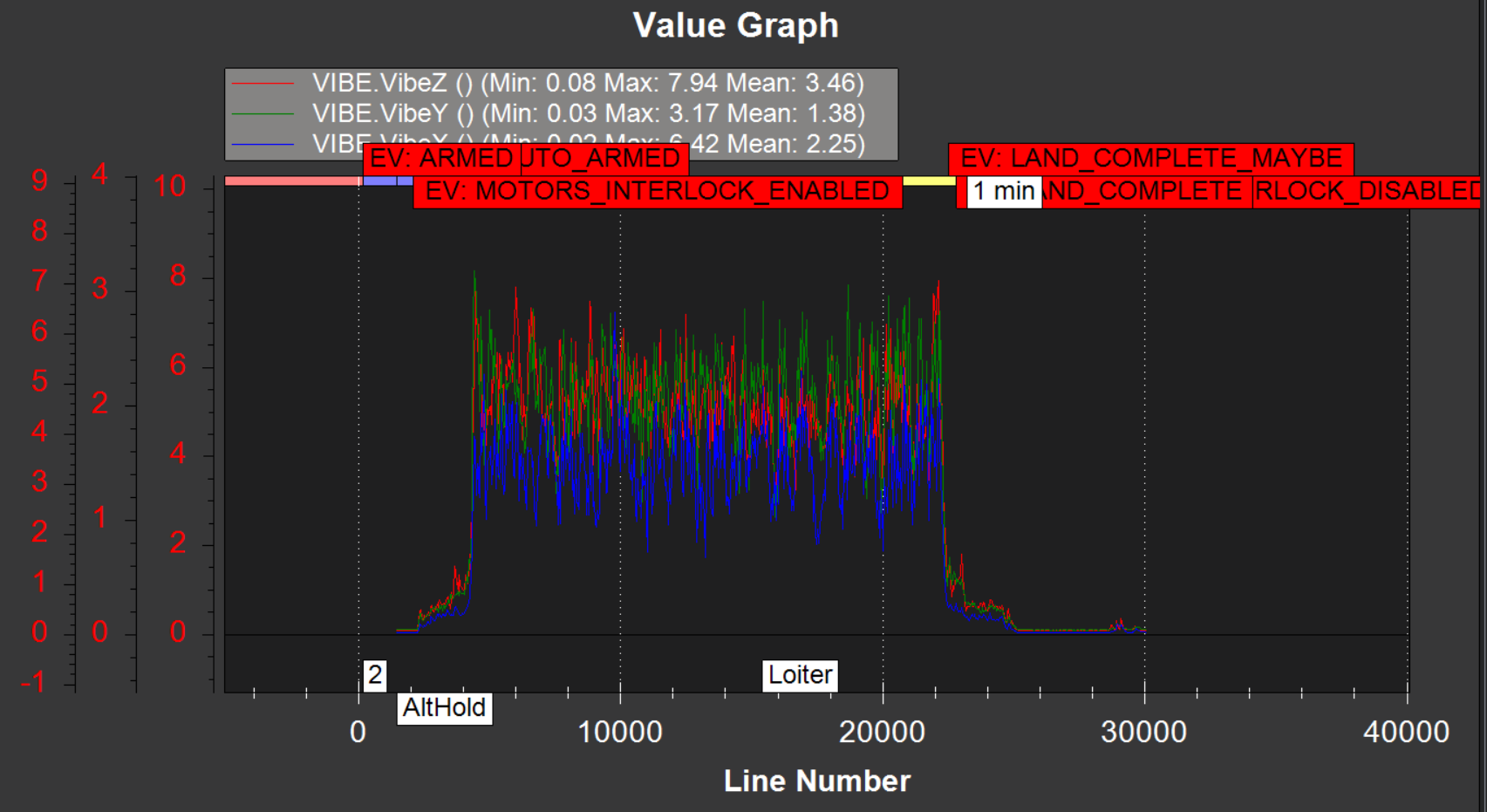
notch parameters as follows:
INS_HNTCH_ATT,40
INS_HNTCH_BW,48
INS_HNTCH_FREQ,96
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,.200
INS_LOG_BAT_OPT,2
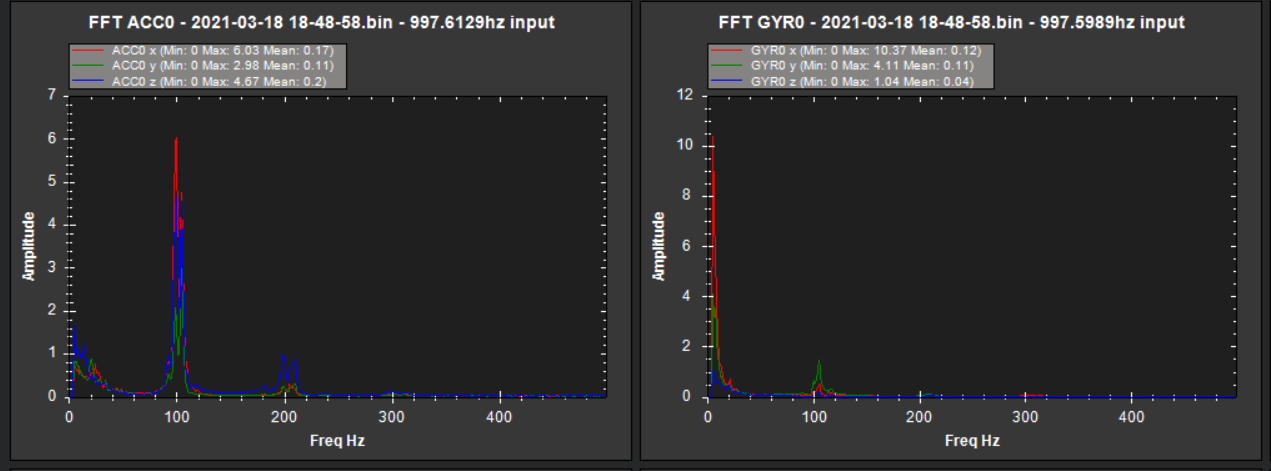
The notch filter only attenuates the gyros
Then what could be the solution? should i try increasing the accel filter value?
You need a physical solution - damping on the FC or something
A solution in search of a problem. This craft is flying fairly well, use it for it’s intended purpose.
I have done some more changes in the mounting and the IMU mismatch is reduced to 0.1 now i am updating the logs pls review will do a long flight tomorrow. dose Roll/Desired Roll and Pitch/Desired pitch look good?
logs
https://drive.google.com/drive/folders/128UK25l7zB4aiCHcDEDEMPioYs7g8MFp?usp=sharing
@dkemxr @xfacta In the past week i have updated the mounting plate bit and now added a rubber dampener instead of nylon stand off and i have increased the gyro filter value from 20hz to 40hz (as suggested for 10-inch propellers) after all this, the IMU mismatch issue seems to have gone. I have done another autotune today the PID values are double the last time I still need to perform a test flight to check for the new values. I want to know how important are these param and should I consider setting them.
- [ATC_RATE_P_MAX]
- [ATC_RATE_R_MAX]
- [ATC_RATE_Y_MAX]
These are set by Auto tune. Presumably you did a pitch and roll autotune and not yaw?
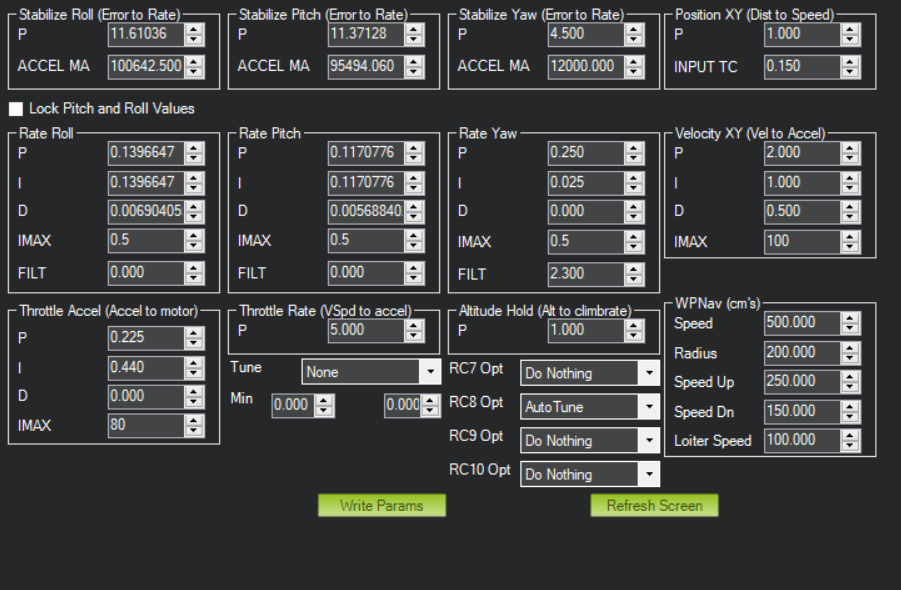
As Dave says, we start with some default or ball-park figures for the ATC_RATE MAX params, then Autotune adjusts them as required. Autotune derives very exacting numbers, in reality you can round these numbers if you need to change them. For example 95494.060 could just as easily be 95000 and you wouldn’t be able to visibly tell any difference in flight.
You can manually reduce them when adding a significant payload (Take Off Weight) as per the tuning guide:
ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
The one I manually set the most is ATC_ACCEL_Y_MAX for Yaw - run a yaw Autotune then see if you get any yaw overshoot (or undershoot) and increase the value to allow yaw to accel and decelerate fast enough to track you desired yaw inputs.
Hello Shawn I have already manually reduced these param as per the tuning guide and only tune for the roll and pitch axis and yes I have only done auto-tune for pitch and roll axis bcz the yaw seems fine but if u suggest I will perform auto-tune for the yaw axis again.
ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
I am attaching the logs from a small test flight i have performed the motor balance seems around in the range of 20-50 as i have observed all the logs.
For this flight I have increased the ATC_ACCEL_Y_MAX to 18000 from 12000 and ACRO_YAW_P to 2 from 1.
https://drive.google.com/drive/folders/1GovrrWD4AjpFIo12n0CffodUvHe5hwHJ?usp=sharing