One major problem is hover thrust is lower than MT_SPIN_MIN
MOT_THST_HOVER,0.1429
MOT_SPIN_MIN,0.15
MOT_SPIN_ARM,0.13
This is bad for attitude control and may cause a fly-away.
I would recheck the ARM and MIN values with MissionPlanner motor test and if you cant set them any lower then you will need to add more weight so HOVER is more than MIN.
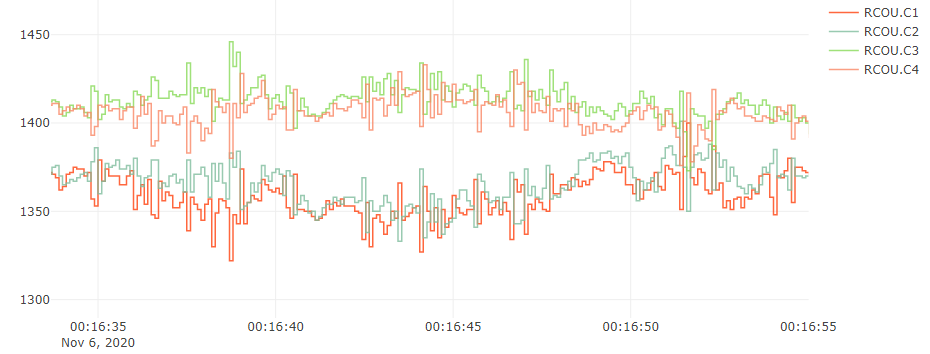
The clock-wise motors are working harder to counteract a physical issue with the CCW motors. This can start to affect stability and control in some situations. Look for twisted arms or motor mounts. Props should all be on the same plane and “point” at each other.
I think Current monitoring is not correct, unless you’ve got the best motors in the world 
You might try BATT_AMP_PERVLT,24 or try calibrating the current sensor properly. Let us know if you want a proper method for doing this.
Is there a reason for so much stick movement? Is it just testing or the craft is moving in a way that you have to correct all the time? Just curious…
Try setting ATC_INPUT_TC,0.2 to at least smooth it out a bit…
Set these:
BATT_FS_LOW_ACT,2
BATT_FS_CRT_ACT,1
And I’d recommend setting these and do another test flight, lots of hovering and nice smooth movements, and maybe some more sudden movements if everything is going very well:
ATC_ACCEL_P_MAX,100000
ATC_ACCEL_R_MAX,100000
ATC_ACCEL_Y_MAX,40000
ATC_ANG_RLL_P,10
ATC_ANG_PIT_P,10
ATC_ANG_YAW_P,5
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.005
ATC_RAT_RLL_FLTT,10
ATC_RAT_RLL_FLTD,10
ATC_RAT_PIT_FLTT,10
ATC_RAT_PIT_FLTD,10
ATC_RAT_YAW_FLTT,10
…then let’s see that log.
You aircraft is small and light and should be able to handle these higher PIDs easily. The existing situation from your latest log shows the quad is not handling so well, oscillating all over the place.
Fix up all those things in the order I listed them before doing more test flights (except maybe the current monitoring, it’s not as critical right now) and try for more stable hovering and at a steady 2 or 3 meter altitude. Use Stabilise mode and if it is working OK try ALTHOLD for a while - be prepared to go back to Stabilise.
EDIT: you can copy/paste the parameters straight out of the text above, into notepad and save as a .param file then load them in via mission planner - that saves making typing errors or trying to find all those on screen.