I had a pretty serious crash today after flying the same mission 4 times with no problems.
It flew 3 flight lines perfectly and collected 92 photos, then after reaching the last waypoint, stopped and was turning for the final waypoint, I noticed a gust of wind tilted it about 20 degrees while it was in a hover, then it went into a spin and flipped over a few times, I tried to switch to position hold as it was tumbling down, but probably should’ve tried stabilize mode instead. I don’t think it was a power issue, motor or esc failure, checking those now, but wondering if the abrupt wind gust knocked it outside of its stability envelope. I didn’t get a chance to run autotune on it yet, its just been too windy, and the aircraft was flying extremely well with the default settings.
I checked the motors & ESCs after getting the damaged parts out of the way, all are working fine, ran the motor tests several times on each.
Also, I forgot to note in the aircraft setup that I also have a separate 5V BEC connected to the pixhawk servo rail for secondary power source, so I don’t think this had anything to do with a brownout/pixhawk power issue.
I’m really new to multirotors, but have a lot of experience with pixhawks on traditional helis, not sure which parameters would be crucial in determining what caused the initial flip, but right before it went out of control, it throttled down #2, and throttled up remaining 3 motors, then gradually throttled up #2 again as it was tumbling down.
Download the logs. At least the last one. Take a look at the throttle output and see whether you are operating over 50%. If over 70% you either are under powered or under-propped.
If using the DJI style props that are meatier at the hub and thin at the tip, I’ve noticed some stability and thrust issues. I’ve only used the clones.
Chuck, it hovers at exactly 50% throttle with camera payload, I’m using the standard 15 X 7.5 Align folding props, its not under-powered by any means, this is a large 800mm quad. I think now this issue was due to flying in too much wind without getting through the autotune first.
Yesterday, a good friend of mine compared the logs with his quad, he has tons of logs so he checked his logs before and after autotune, and mine was not even close to his especially when comparing the EKF3 IPD variance, so we’re thinking the sharp gust of wind when it was in a stationary hover was just too much for it. Once I get it repaired, will get through the autotune before flying in any significant wind.
I saw a difference in stick position (throttle input) vs. throttle output from the FC. Output was hitting near 100% at times and sluggish while the stick was at 50%. I went to a bigger prop and am around 60% output now.
For those interested, I eventually discovered this crash was due to both ESC and motor incompatibility with a Pixhawk. I first changed out all the ESCs, that still didn’t solve the problem, then changed out all 4 motors, and finally, I had a system that was fully compatible with the flight controller. The cause of this crash was due to a sharp gust of wind that required a very high throttle response to counter, and I later found out that certain ESCs and motors are simply not capable of responding to throttle requests above certain frequencies, so when the hard gust of wind hit the quad, the amount of throttle response required to counter the abrupt attitude change vastly exceeded the frequency the ESCs and motors were capable of responding to, and they stalled out, and it flipped over with no chance of recovering after that point. So, in short, always make sure your ESC and motor combinations are fully compatible with the Pixhawk flight controller.
Jeff, what happened is that in the wind gust it ran out of throttle overhead to keep itself stable. Motors 1 & 3 were running wide open and throttling to try to recover it, and it had large deviations in attitude due to not enough power and thrust to keep it stable.
As you have probably known, helicopters can handle wind that multi-rotors can’t, and the larger a multi-rotor gets, and the bigger the props, the worse they get in the wind. There is limitations on how fast motors can throttle and change thrust vectors compared to the cyclic response time of helicopters that are capable of extreme 3D flight maneuvers.
I’m not seeing that in the log. I just see the throttle signals going to 100% on the motors trying to stabilize it, and the problem you describe should cause stalling of the motors if you did an abrupt full throttle climb. I just see the Pixhawk sending a 2000 pwm microsecond signal to the ESC’s, which should be in the range that any ESC can handle.
From what I can find on those particular ESC’s they have adaptive timing, a reversing feature, frame rate up to 500kHz, and pwm microsecond input range of 1000-2000. I don’t see where the Pixhawk exceeded any of those specs. The reversing feature is similar to Align’s helicopter ESC’s. So I don’t think that should be an issue.
Just trying to identify what the specific incompatibility would be with ArduPilot. The Pixhawk’s output looks within specs for them across the board. I think you would have to do a bench test, tie the copter down, and operate it at full throttle under controlled conditions to actually identify a motor stalling problem above a certain throttle pwm range. Otherwise all the indications in the log I looked at show that no motors actually quit. They just ran out of thrust based on the throttle percentages I see vs desired vs actual attitude. She was trying, but ran out of power
Chris, I know that’s what it looks like in the log, but in reality what happened is the aircraft got hit by a strong wind gust when in a hover, this caused the airframe to roll abruptly, then the flight controller tried to level it by sending very high throttle requests to the motors on the opposite side, and the motors simply could not read the high throttle signal, and it flipped over and tumbled all the way down from 200ft, there was nothing I could do.
After this crash, I tried to do an Autotune, and the same thing happened, it would do the first roll maneuver, try to counter with an even higher throttle request from the opposing side, and again the motors could not read the high signal and it would flip over. I then replaced the ESCs with known compatible components, and still the exact same result when attempting an autotune, then I replaced the Align motors, and finally it worked perfectly the first time I attempted an autotune.
The Align ESCs cannot be programmed, they’re designed for Align’s flight controller, and the motors are not compatible either, I do think this is a frequency(sync) problem that simply cannot be adjusted. In short, if you attempt to run a Pixhawk with these stock Align ESCs & motors on an M480L, the result will not be good, it will fly, but will simply not respond to high throttle requests, so is basically a disaster waiting to happen.
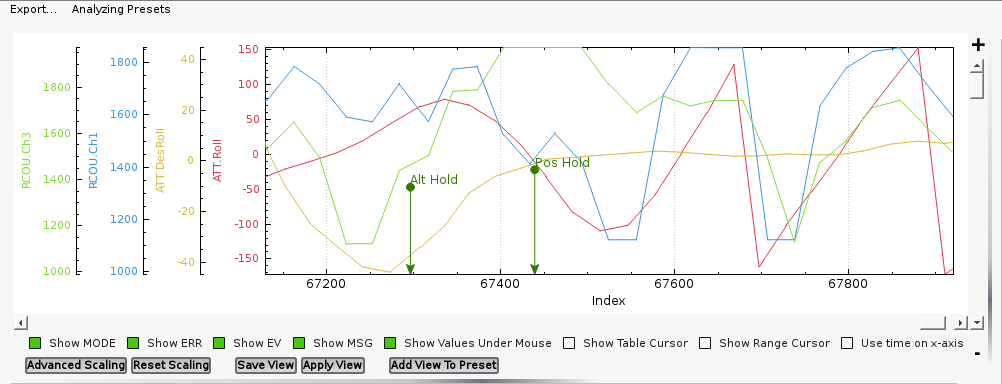
I commented on the issue on GitHub. The logs do not indicate that based on the power consumption measured by the power module and calculating the individual throttle percentages. The motors were simply maxed out trying to regain loss of both yaw and roll control. RCOUT.1 was operating at ~90% power consistently before the crash, which also corresponds to the wattage power consumption, calculated from the individual throttle percentages @ the 7m/s ground speed it was traveling at prior to hover.
It just flat ran out of thrust on one corner trying to correct 40 degree yaw deviation and 70 degree roll deviation at the same time. According to Align’s specs, the maximum speed for this copter is 15m/s and maximum allowable frame tilt is 30 degrees. It hit way over 30 degrees tilt when the wind hit it. It peaked at 1,375 watts while the Pixhawk was trying to regain control, but the aircraft was simply beyond it’s thrust limit to correct that much deviation from desired attitude and couldn’t recover.
This was with Copter 3.3.3 BTW. And running the default PID’s, untuned.
Right here you stated what the problem is. It’s the motors. Three-phase AC permanent magnet motors are nothing special. As long as the speed controller sends them the three-phase AC psuedo sine waves at the correct timing by measuring the back EMF on the inactive phase in the motor, they just run. The interaction between the ESC and motor has nothing to do with the pwm signal sent from the Pixhawk on the throttle line. It just tells the ESC’s microprocessor how fast to trigger the FET’s to run the motor at the right speed, AC frequency, and phase angle.
It could be a ESC calibration issue if the ESC can’t read the full 1000 pwm microsecond signal range. But if you replaced the ECS’s and still had the same problem, then it wasn’t ESC cal. It was the motors all along and the Pixhawk has ZERO interaction with the motors.
Chris, the motors could very well have been the root of the problem, but I didn’t like not being able to verify settings or program the ESCs (especially for timing), and I didn’t have a lot of time to troubleshoot the problem, so it was just easier to replace both. I replaced the motors with 360kv KDEs which work perfectly, and I still use the stock Align 17" props, it carries a 2LB camera payload easily, and hovers with it at 50% throttle which is perfect for a quad rotor, so it is neither under-powered or under-proped. I’ve built three of these airframes since, and have flown them in 20mph winds with gusts to 30mph, so its now a very safe, capable, and efficient quad airframe.
All of Align’s ESC’s have adaptive timing. The helicopter ESC’s have low, mid and high settings. The multi-rotor ones are designed to only measure the back EMF on the inactive phase of the motor and use it to determine phase and timing angle for the rpm the motor is running at.
The biggest issue with Pixhawk would be not being able to calibrate the throttle, but that doesn’t appear to be the issue based on what I see in your log. The power consumption of the aircraft corresponds nicely with throttle percentages, meaning the ESC’s were responding to the throttle just fine. And in hover the sync of the ESC’s looked pretty good with the throttle percentages per motor nice and even. It only got off when the aircraft started fighting wind.
KDE motors are high-end motors, the Aligns are not. Without actually bench testing one of those Align motors you can’t be even be sure their Kv rating is right. They’re not very popular motors in the multi world. And even in the heli world the Align motors are usually the first thing to get replaced with a higher quality Scorpion or xNova because the bearings don’t last, they run hot, and their winding and core loss quality leaves a little to be desired.
With the KDE’s you can be pretty sure that if it’s rated at 550 watts the motor will actually deliver. That might be a calculated, inflated spec for the Align’s.
These brushless motors are nothing special. But there is huge quality differences between the different brands, in the iron losses in the core, what magnets are used, and winding quality. That’s why a 700-class Scorpion costs $300 and an Align only costs $169.
Basically, Align is a vacuum cleaner company that builds RC aircraft as a sideline**. I think their multi-rotor aircraft are designed to compete in the market at a price point. And while it may be a very nice aircraft I can’t believe the drives they use on it are any better than their helicopter drives. Which are grossly over-rated to the point where they are using 700-class motors in 550-size helicopters. You can pull the 700-class drive out and put in a 600-class Scorpion drive and get better power and performance on less amps.
I honestly think the whole problem was under-performing motors right from the start.
**Kind of a joke - on HeliFreak the common thing is that most people say Align’s vacuum cleaners really suck. And so do their helicopters. LOL! But, honestly, I’ve found their helicopters to be not too bad for hobby-grade stuff.