Hello All.
I have built a quadcopter some months ago (500mm X frame), using a Pixhawk 2.4.8 FC, 2216 kv880 T-Motor motors with 1045 propellers, M8N GPS and compass, BLHELI-S 30A Dshot600 ESC , Sik radio (900MHz), Minim OSD, and TFMiniS lidar.
I am using 4S Li-ion batteries. Take off weight is arround 1,6 kg (3.53 lb).
Firmware version is ArduCopter V4.0.7 (0bb18a15)
With “stock” PIDs the quad worked decently and I did at least 20 flights.
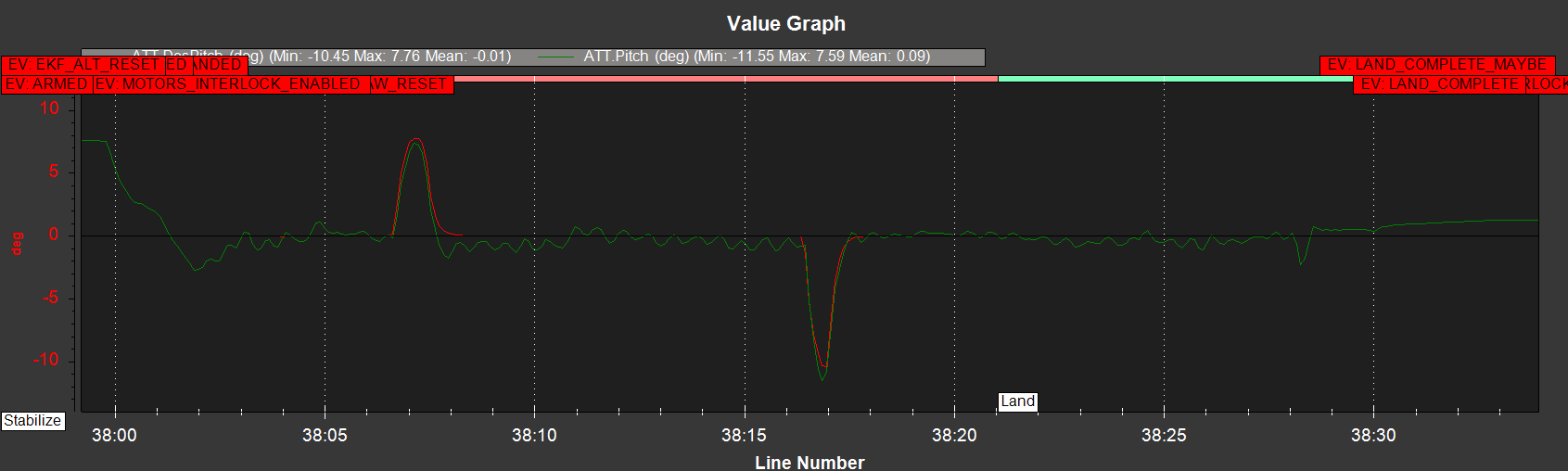
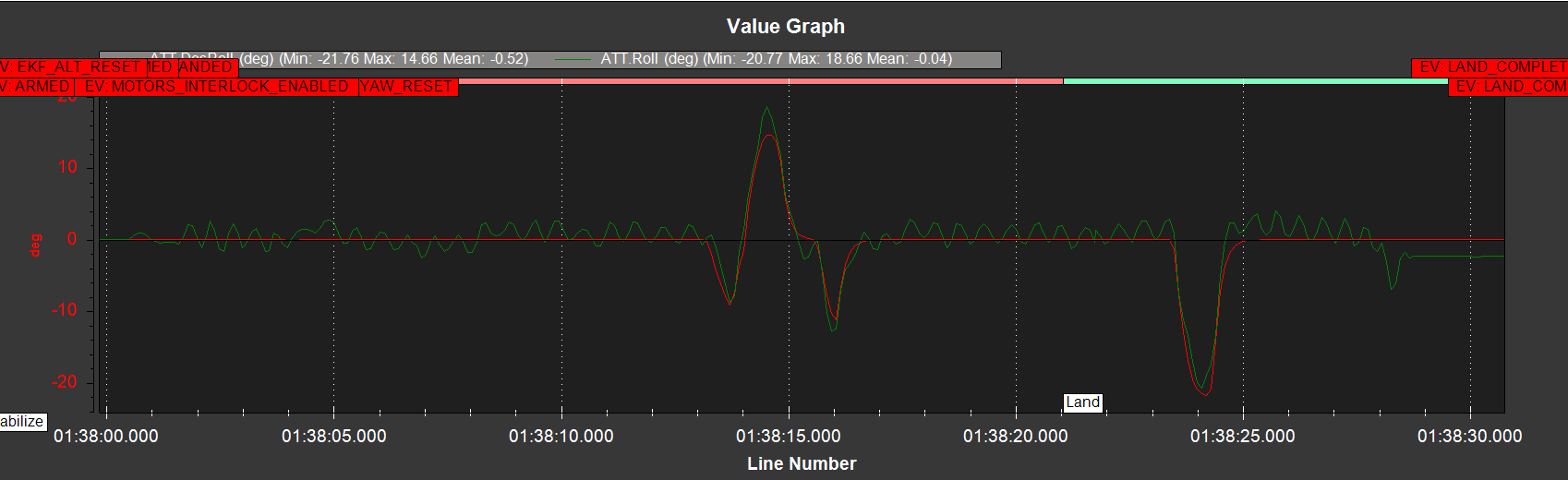
One day after taking off in stabilize mode and switching to loiter, the quad started doing violent oscilations arround X axis (oscillatory rolling). I tried calibrating accelerometer and compass several times (I dont know if I can calibrate the gyroscope). EKF Status usually shows in red velocity_horiz Off and pos_horiz_abs Off.
Since then, I could not find a way to correct the oscillations, and that oscillatory behaviour remains.
My actual knowlegde, does not enable me to analyze the FC logs to determine the origin of the fault.
I have attached a link to the bin file of the log of the last flight (some seconds of loiter).
I would appeciate if someone can give me some orientation about how to solve this issue.
I’m thinking its a tuning issue. If you open the log browser and look at the items in RATE, they don’t look how they should. Maybe double check these guides? The first one describes how to remove the oscillations that sound like you have
Immediately land if any oscillation is observed. Next section will explain how to remove the oscillations.
at first step you need some manual tuning to get it working without oscillation
1-Increase the D term in steps of 50% until oscillation is observed
2-Reduce the D term in steps of 10% until the oscillation disappears
3-Reduce the D term by a further 25%
4-Increase the P term in steps of 50% until oscillation is observed
5-Reduce the P term in steps of 10% until the oscillation disappears
6-Reduce the P term by a further 25%
Hello Derek. Thank you for your message.
I did the steps in https://ardupilot.org/copter/docs/tuning-process-instructions.html
till I get to https://ardupilot.org/copter/docs/tuning-process-instructions.html#first-flight
I tried to take off and keep a position in stabilize mode and then in alt hold. The quad started to drift. Switched to land mode and did not respond properly (as it did in the past some weeks ago). It continued drifting, then I lowered throttle to try to land manually and crashed in the grass. I noticed that the motors were really hot to touch.
After that, I waited for the motors to cool down and I loaded a parameter file from March (I backup I did) and tried again. During take off oscillations appeared again. So I went to the step https://ardupilot.org/copter/docs/tuning-process-instructions.html#initial-aircraft-tune and reduced values in 50% as indicated
Then I tried again and achieved to take off without oscillations (noticeable by eye). Motors are slightly warm now (as were usually some months ago).
So next weekend I will try to work from this point.
I dont understand what may happened because I did not change any PID parameter since I built the quad (and as I told in my initial message, I have flight the quad withouth such oscillation problem in the past).
Is it possible that the oscillations are caused by some kind of change in the behaviour of the hardware (for example, “health problem” in an accelerometers or gyroscopes)?