hello,
i put the gps here on my quad (with external compass used as primary compass) and i update the software (3.4.6),just after calibration of compass, etc… , i went to fly in stabilize, and, just after going up (4-5 meters) , it flip over himself, i broke a arm, two props, the gps support but I didn’t touch the sticks
i check the log, and i have the error : “EKF check-2” but i did a lot of flights before without any problems
do you know how fix that ?
thank you
2017-04-17 19-10-15.log (951.0 KB)
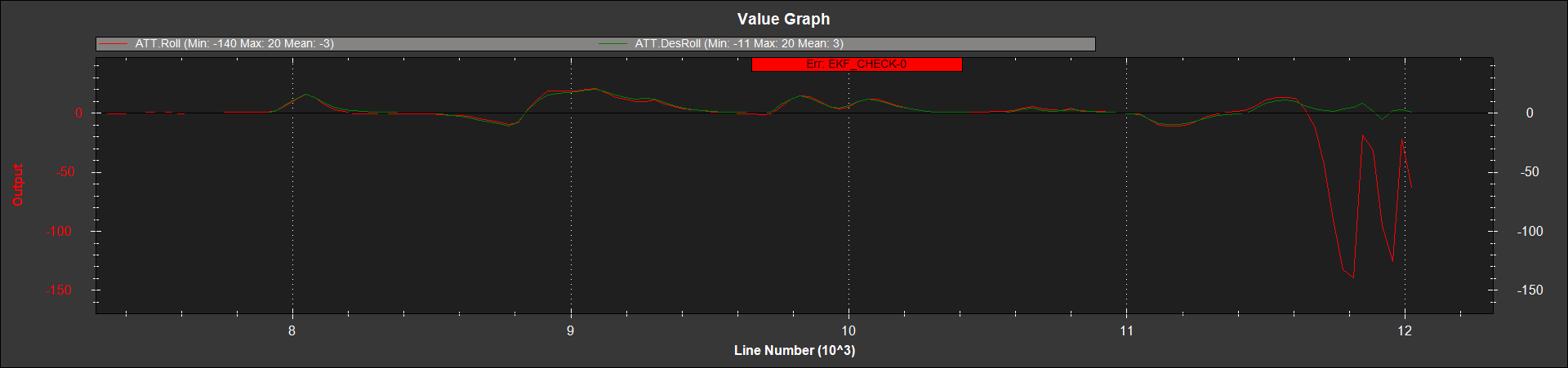
From the graph, it seems to me a mechanical failure, as the roll and pitch starts to diverge even though the desired roll and pitch were trying to counter back. The IMU measurements looks correct.
thank you
i will check that again but apparently everything work great