Is it possible that a quad suddenly falls out of the air because of the heat? I was flying today and it’s in the high 80’s. My quad, F450 w/ pixhawk 1, suddenly fell out of the air when performing a z-axis (yaw) auto tune.
It’s also worth mentioning that it did get confused on a prior flight while auto tuning yaw and I beleive it was because of the wind. I am getting a 9-10 mph breeze today. On this go, it oscillated a bit like it was trying to balance itself out, but failed and just dropped.
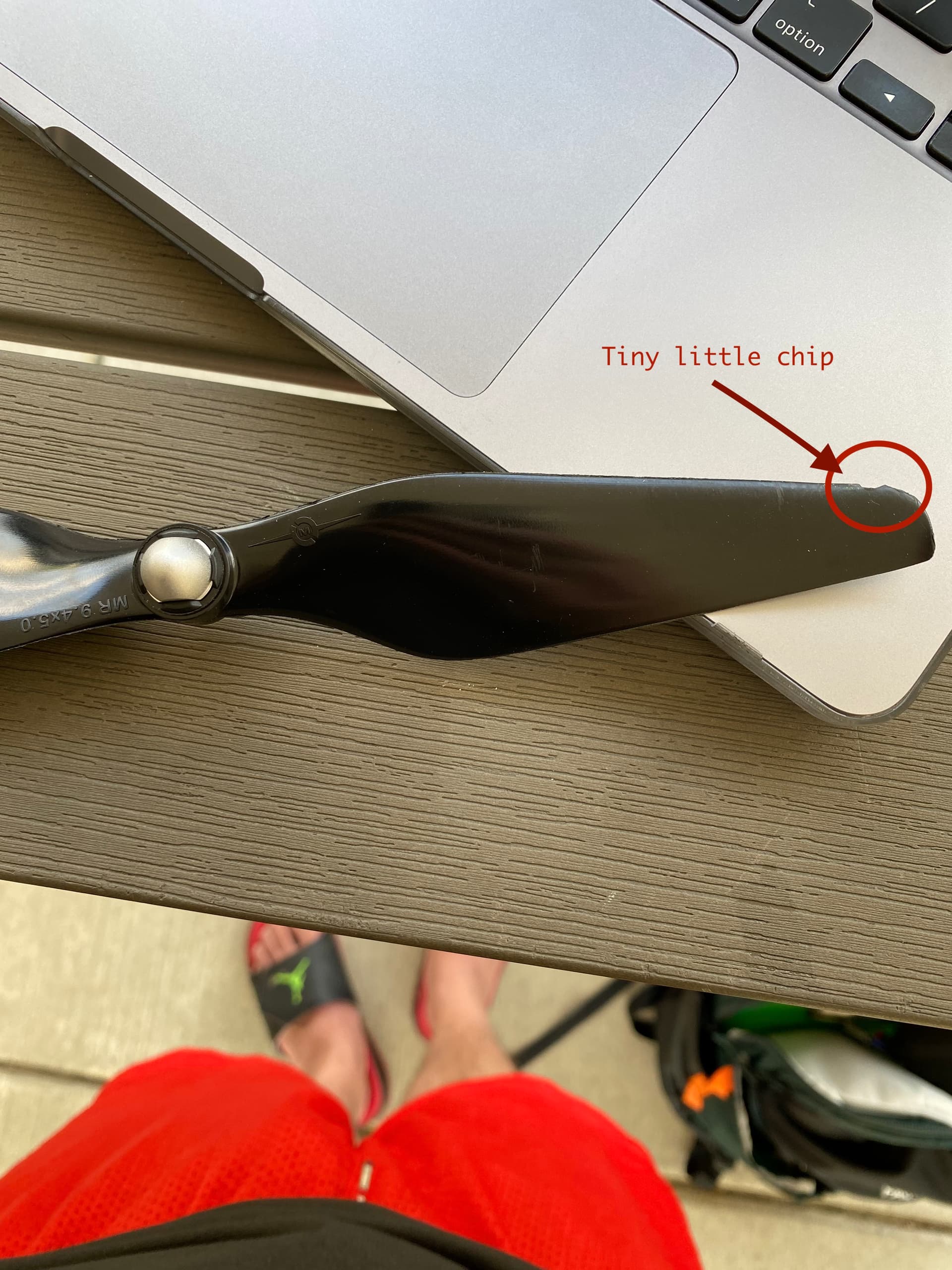
One of the props (Master AirScrew built-in nut) chipped a bit. I was wondering if they are still good… would you fly with the prop chipped as is?
i would not use that propeller because it might be structurally and/or aerodynamically compromised, and the mass imbalance may cause vibrations, which will mess with your flight controller’s sensors.
I will greatly appreciate it if you could take a look at the flash log and teach me what I should be looking for in an issue like this. From the wiki, I saw that a good starting point is to plot the ATT: DesRoll & Roll, which will boil it down to mechanical failure. I did that and I see the issue, but I havent gotten past that.
I have attached both… the first drop and the second. I would like to investigate any correlation between the two drops because they seemed pretty random, well the second drop seemed random. The first, I could tell that it was very confused by the oscillations. They never went away and it just dropped.
Regarding the TWR, I approximated it to be 1.84. I took the average of three youTube thrust tests (ref here, here, and here) that used the same motors as I, multiplied by four, then divided that product by my craft’s total weight, which is 1211.5 grams.
I also stopped flying with those props because I agree and think you are right.
the bigger problem though is your ROut going crazy. i havent used autotune, but i dont think it should be doing this. maybe it is though, maybe the initial params are too far from what they should be. someone who knows more about autotune can chime in. your other attitude outputs look fine, but the log i looked at (the first one) is only able to do roll tests (that i saw) before crashing.
no, its not high priority for the devs. it requires a change in the core code (AP_MotorsMatrix.cpp) which would require a lot of testing. Generally, it is considered T/W < 2 is bad anyways and you shouldnt do it (though i disagree). So not high priority to fix this unfortunately.
Virtually everyone denied this behavior was even happening, until I proved it occurs in SITL (simulation, see the PR description for the proof). The initial denial was due to the fact that this problem can be conflated with other problems like bad tuning… But now I think devs don’t deny it.
It’s not a bug. Or, I don’t think so anyway. The code controlling this is there purposefully as a couple Dev’s with primary responsibility for it explains. Just reading thru the PR will provide good context for why it is how it is. If nothing else it gives an interesting insight into how comprehensive Ardupilot really is and it certainly did generate good discussion before it was closed. But, you have to read the entire PR.
if i remember correctly, what is explained in the pr is why it couldnt be fixed immediately, not that it shouldnt be fixed. in fact, the dev who introduced the … “debatably problematic thing” … recognized that my pr was a hint toward a “real” solution.
i guess another reason it hasnt / wont been fixed is that there are many who deny its a bug i dunno, i crashed 3 times before applying my “fix” and never crashed thereafter so… and the SITL tests prove it happens, and is preventable… i am genuinely baffled at the reaction to this, but sometimes it do be like dat.
steel-manning others’ position for a bit, i speculate the main point of contention is whether or not ardupilot should give up altitude (e.g. remain flying) for attitude. i believe the autopilot should never give up altitude for attitude when it can be helped, but others may not agree with this. but, to further my claim it is a bug, this behavior was totally unknown and even vehemently denied when I proposed it.
at the end of the day, as long as mods arent deleting my posts notifying ppl of this behavior, im fine. whats strange though is that i am and have been the only one notifying people of this proven behavior.
Getting back to the actual problem…
I believe the crashes are because of low battery voltage, and the ESCs were cutting out or at least providing inconsistent output.
You seem to have a 3S Lipo and the battery failsafe voltages are wrong, too low!
You need to set these:
BATT_ARM_VOLT,11.00
BATT_CRT_VOLT,10.50
BATT_LOW_VOLT,10.80
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 // or 3
If the failsafes seem to be happening earlier than what you expect, DO NOT change these settings! You check and calibrate the voltage sensor, and test your battery capacity → most chargers have charge and discharge cycles available - record the mAhr the charger says it discharged and charged. Does it closely match the advertising on the case of your battery?
haha yeah, sorry to go down a rabbit hole, but as long as T/W > 2 most agree ardupilot works well (after tuning etc). I highly suggest increasing T/W > 2 (even at low batt) to easily avoid potential issues.
You hit it right on the head! Thats exactly what I did . I will set the appropriate params now.
I have configured the voltage sensor since then and it reads pretty accurately. However, I only measured and configured the voltage. I am out in the field flying now, so do you think I should try measuring capacity now or can it wait until I get home tonight?
Okay, I guess I now have to address the TWR. I really cant go down in weight, I’m already in the leanest state, so I guess I’m forced to get the new motors, props, and ESC. I was trying to drag it out but I guess I shouldnt any longer to get the TWR > 2 because that drop was weird and scary tbh.
You have to get a new battery and relegate that poor one to bench testing.
If capacity is substantially lower than the rating on the label, it could gracefully get lower and lower over time, or it could suddenly fail as one cell gives out entirely.