I just finished building the quad, got it hovering in stabilize, switched it to alt hold about 20ft in the air then turned on auto tune. It looked like it was tuning for a while, then it flipped and fell to the ground. Any idea why? Log attached
Pixhawk with ArduCopter 3.2.1
The fall damaged the frame enough that I was already planning on getting a new one (this happened on an AeroQuad Cyclone frame, getting the 3DR quad frame kit to replace it) so I flew it again anyway not concerned about it crashing. It flew very well for a while, untuned, until a similar thing happened at the end of the flight. It flipped, lost control, and fell to the ground. Perhaps the log for the second flight will help figuring out the first issue?
Didn’t read the logs. However, it’s been noted that Auto Tune can aggravate issues that exist.
I suggest conducting 3 flights that prove STAB- Alt Hold & Loiter are predictable, before trying AutoTune.
This will assure you that GPS, vibrations etc. are functional.
SC
[quote=“catchers”]I just finished building the quad, got it hovering in stabilize, switched it to alt hold about 20ft in the air then turned on auto tune. It looked like it was tuning for a while, then it flipped and fell to the ground. Any idea why? Log attached
Pixhawk with ArduCopter 3.2.1
The fall damaged the frame enough that I was already planning on getting a new one (this happened on an AeroQuad Cyclone frame, getting the 3DR quad frame kit to replace it) so I flew it again anyway not concerned about it crashing. It flew very well for a while, untuned, until a similar thing happened at the end of the flight. It flipped, lost control, and fell to the ground. Perhaps the log for the second flight will help figuring out the first issue?
I am still having issues with the new frame. I took off in stabilize, then kept it in loiter mode in mostly the same place about 10ft off the ground. It flew very well for about 10 minutes, then it started having trouble holding the altitude steady, using extra power to go slightly higher, then slightly lower. It did this for about a minute or 2 until it fell and crashed.
Is this an issue with how I have the power connected? I am using the connector from the power module, store.3drobotics.com/products/a … connectors , to the Pixhawk, and my ESCs are plugged into the Pixhawk which have BECs.
I’m pretty sure it’s a sync issue with your ESC as the autotune will push the limits
the last second when engaging autotune RC outs started normal procedure then crashed
What you wanna do in order to confirm this is to hold the copter to the ground to prevent it from taking off and start pushing throttle quickly between low and high like the video here :
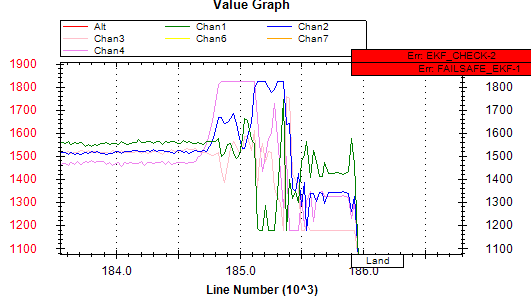
The log you posted a screenshot of was not while it was in auto tune; it was in Loiter.
I looked for sync issues but did not find any. I tried moving the throttle up and down quickly on the remote, and reversing the throttle channel so it instantly goes from min to max and vice versa. I did not see any motor stop or slow down for even a moment.
there is something weird with your copter, the Rcin vs desired vs correction goes non sense.
Please redo calibration of all instruments. make sure the board orientation matches the SENS_BOARD_ROT
Hold it to the ground and make sure your rc inputs matches the expected behavior.
If nothing is wrong, disconnect all red cables from servo cables.
I recalibrated it, and I also lowered the default P values in the PID tuning. It flies reasonably well, I can fly it around pretty far, maneuver it, bring it back and land it. No more issues with it falling out of the sky.
I tried autotuning it, but when I switch it to autotune it does not do anything even though the log confirms that it is indeed in autotune. Going back to my initial post, I realize that it was not actually autotuning then either. (I figured this out by watching autotuning videos and they show that the quad should start twitching right away).
Attached is the log, with full logging enabled. Any ideas?