I am having an issue with Loiiter mode on my Arducopter.
Here is what happened. I was hovering at about 2Meter ( eye level ) altitude with 16 Sats in Loiter mode. All was calm and stable.
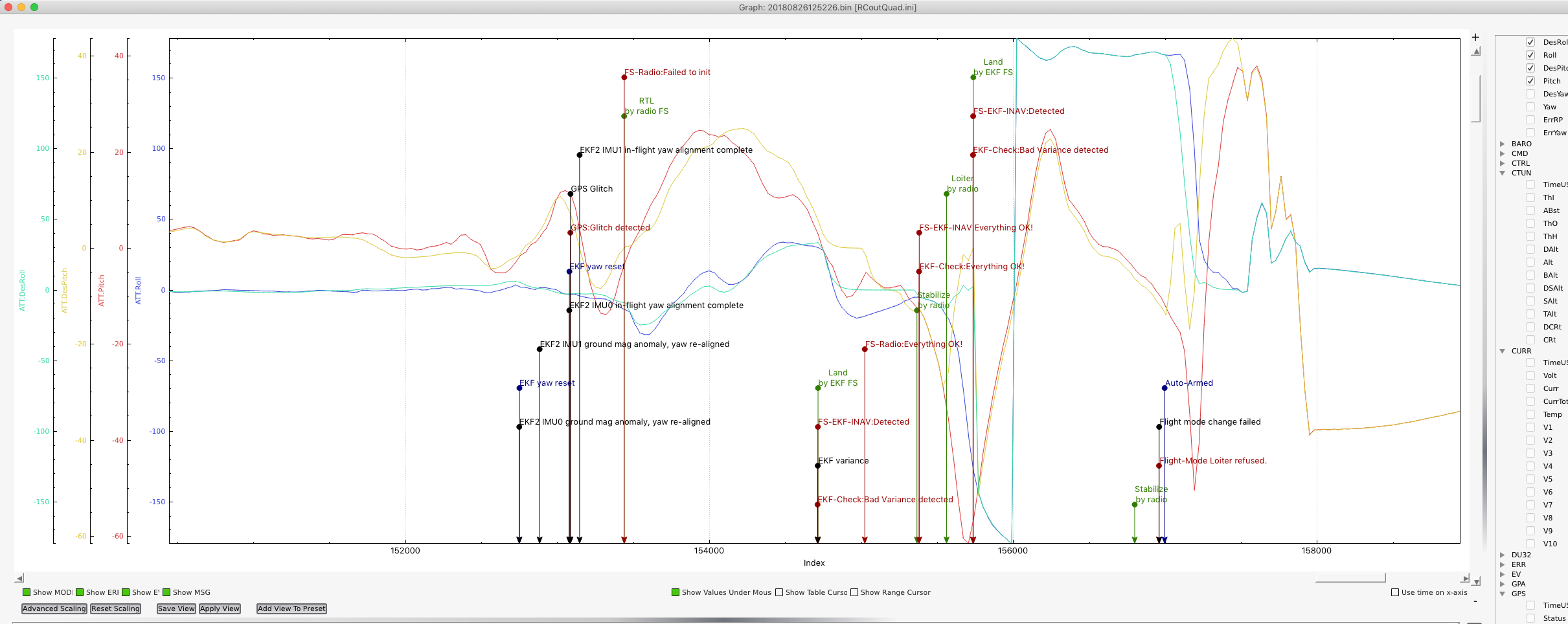
After a few minutes, the Quad seems to automatically go full throttle and shoots up . In less than 3 seconds it climbs like 50 meters. I try to do an RTL, nothing happens, it then tilts sharply, motors switches off, and crash lands.
It was scary, extremely scary and someone could have been hurt , very badly hurt.
In terms of the build, everything i could see was perfect. The motors were all good, Escs and Radio were perfect. Vibrations were very little. GPS was good, there were not much winds.
Attached is the log.
Hopefully someone can help. If any kind of a bug, this is very scary !
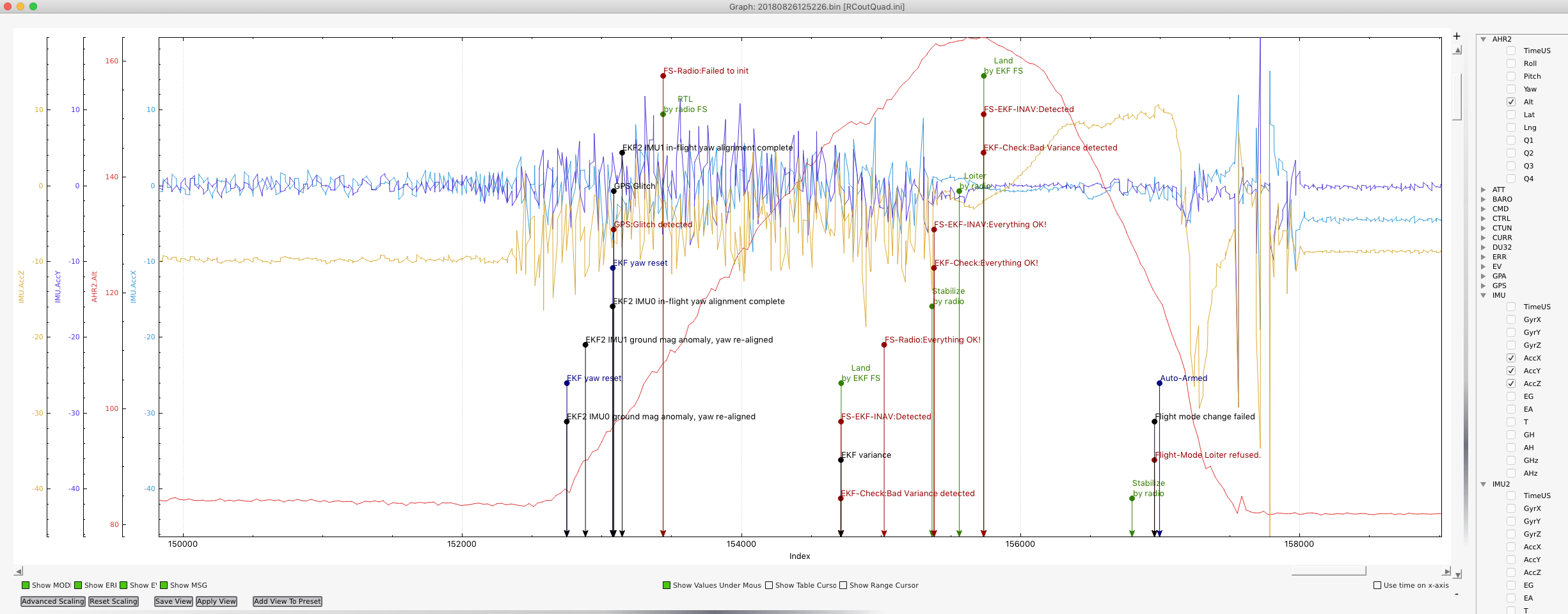
What is noticeable is large vibration increase at that time, which would account for a vertical climb, as it is an atypical symptom of high Z axis vibration.
Thanks ! there was no mechanical failure. Even after the crash, ( which luckily did not damage any component as the quad fell with motors off on a soft surface ), the flight controller and GPS were mounted and nothing had come loose.
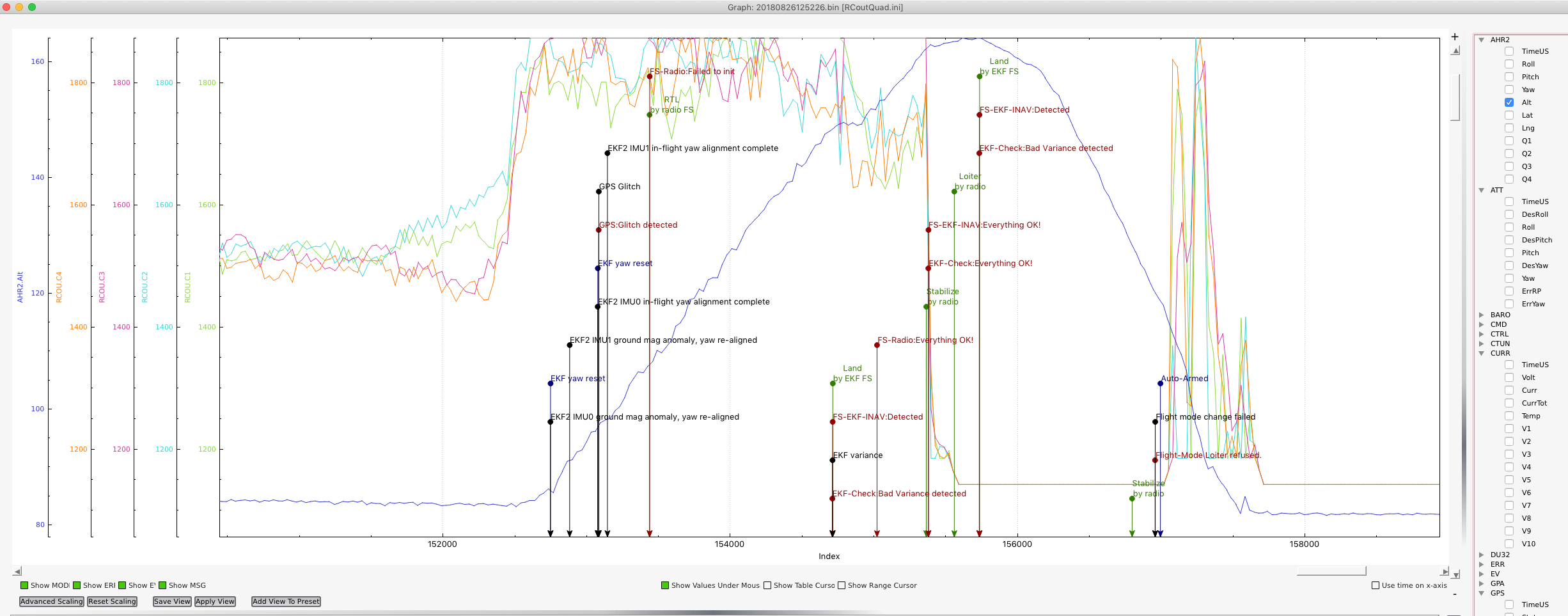
As to the vibrations, from the graphs the vibrations seems to rise once the quad gets full power. This is expected due to all motors going to full throttle ! What I do not understand is, that when the Baro and GPS alt suggested that the altitude is increasing, why did the flight controller not reduce throttle to lower it ?
could the vibrations have anything to do with that ?