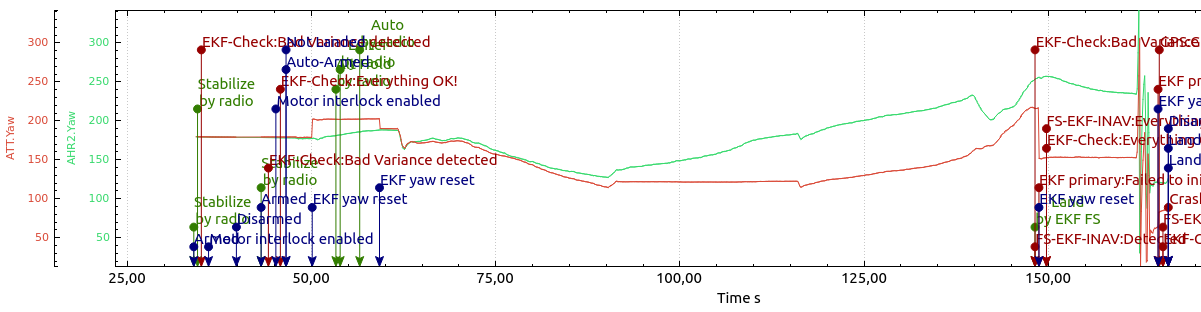
Crashed my Quad while doing an automission on a nice calm evening. Something started going wrong from the very start as i noticed the Quad was not pointing i the direction of flight it did appear to sort itself but about half way round the mission basically fell out of the sky. The Log shows a lot of EKF errors. Can someone take a look and tell me what i did wrong.
EKF gave up and went into failsafe (LAND mode) - so no navigation…
14 seconds later , while descending , it hit something and crashed.
You did some input in the meantime, but apparently did not realize it were in LAND mode.
Don’t fly that far away until you have everything well tuned. Don’t underestimate the importance of magnetometer on a quad (and you were using only one, which is fine, if it gives good data.)
Flight monitoring done right, with telemetry, would still allow you to take over and fly home by instruments.
Andre
Thanks for looking at this the compass or EKF was not right the moment it took off should have landed and reset. But hay you learn something everyday.
Why do I sometimes get a EKF variance when arming?
Should I use one of the other compasses on the pixhawk 2 even if the mag interference is high?
This Quad setup has hundreds of hours on it now. First with the original pixhawk now pixhawk 2 and had already done this mission earlier in the evening.
Back in the air tonight and all appears to be working well.
It is bad magnetometer data.
remember that even bad magnetometer calibration is always correct in some direction, if not, for some time it may be ok. - you flew a big arc.
Your heading were deviating more and more…
is it possible that the compass/magentometer become loose/twisted a bit in transport ? - a slight aligning problem, not pointing “forward” could have caused it.
Recalibrate magnetometer.
fly at least 4m/s in 4 directions, (nose ahead) and enter “brake” , you should see a clear stop, (lean backward only) no tendency to fly in another direction while breaking, then returning.
if you did that with the crashed RPAS, it would not stop perfectly.
Sorry what do you mean by enter brake, should the 4 directions be done manually or auto
is the EKF variance during arming anything to worry about.
should i use a second compass
Thanks
i mean switch to brake mode, - but if you do it in poshold or loiter, then you just need to release the stick.
there is no definitive answer to the last two questions EKF variance is not good.
enabling other compasses depends on their placement. (away from power)
Andre Thanks again for the reply will do a few test and recalibrate the compass and do a few tests.
David Ardis