Hi. While flying, I noticed strange altitude behavior. Quad was randomly changing altitude in PosHold, ±5 or more meters, in different situations, even in very slow forward flight. In the end, it went down 5 meters and I was slow on reaction, it hit the ground.
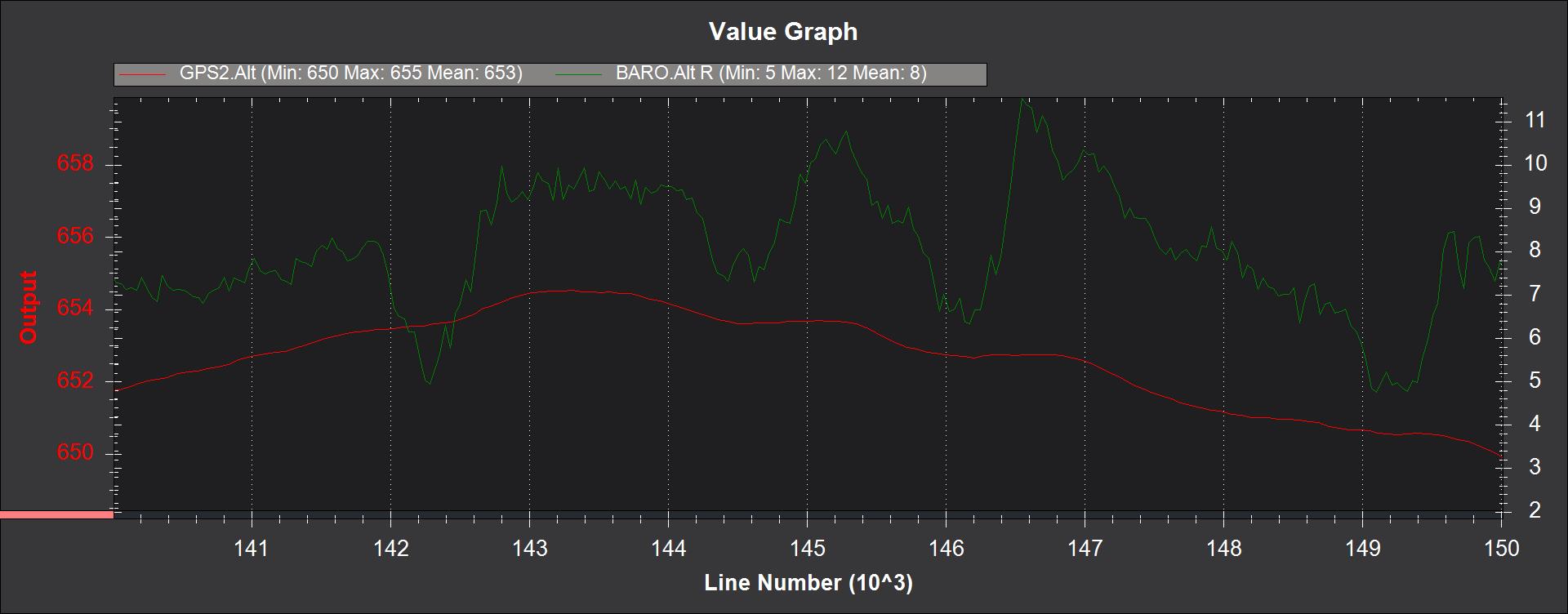
Logs show, that barometers report changing altitude, while GPS altitude is not so changing.
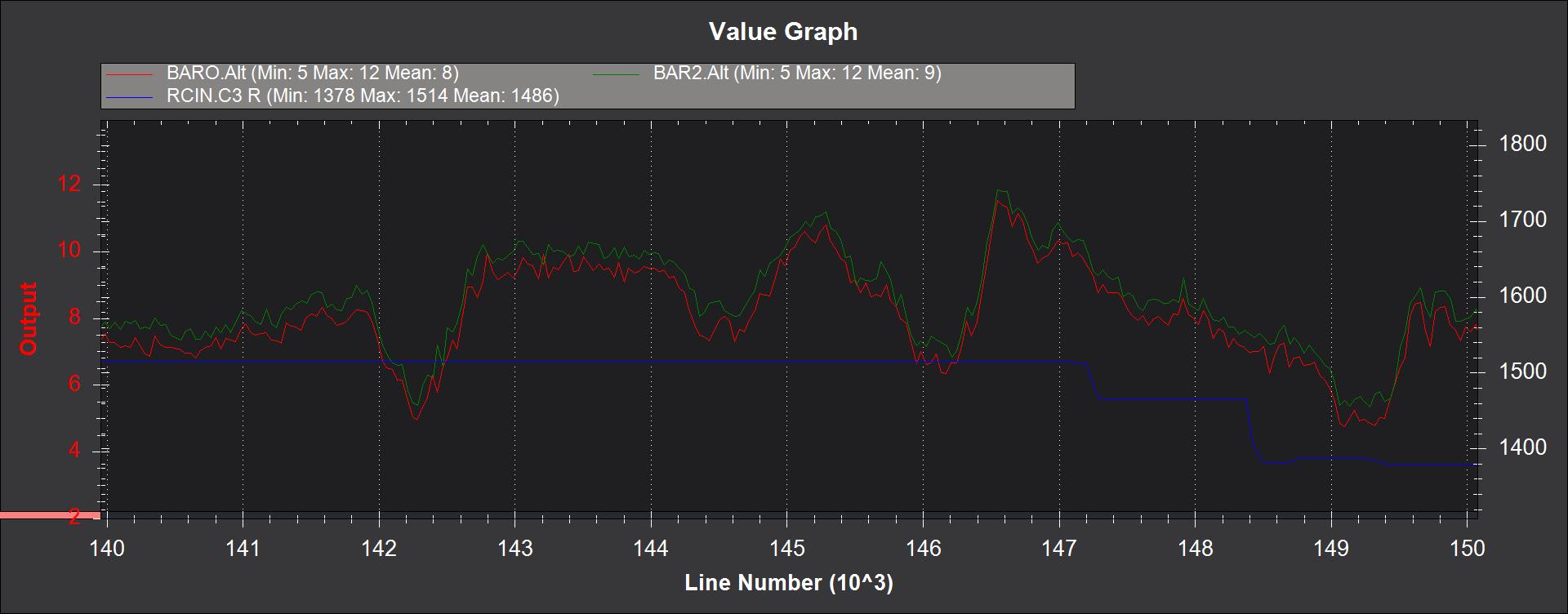
Here, quad flies at constant altitude, then barometers report +7 meters altitude, FC reacts by lowering motors output and descending, until I notice the change and throttle it up:
It is Cube 2.0, which has 1 barometer foam covered, and other, which is vibration isolated, is not. But both show similar altitude, so, I guess it is not the reason.
Also, the quad was flying well for several months. Last thing I did was upgrade to 3.5.7.
The 3.5.7 upgrade is unlikely to be a problem, it seems very stable.
I don’t know enough about innovations and the other EKF stuff, but Y vibrations look high to me. I’d check for something loose or wiring transferring vibrations to the FC.
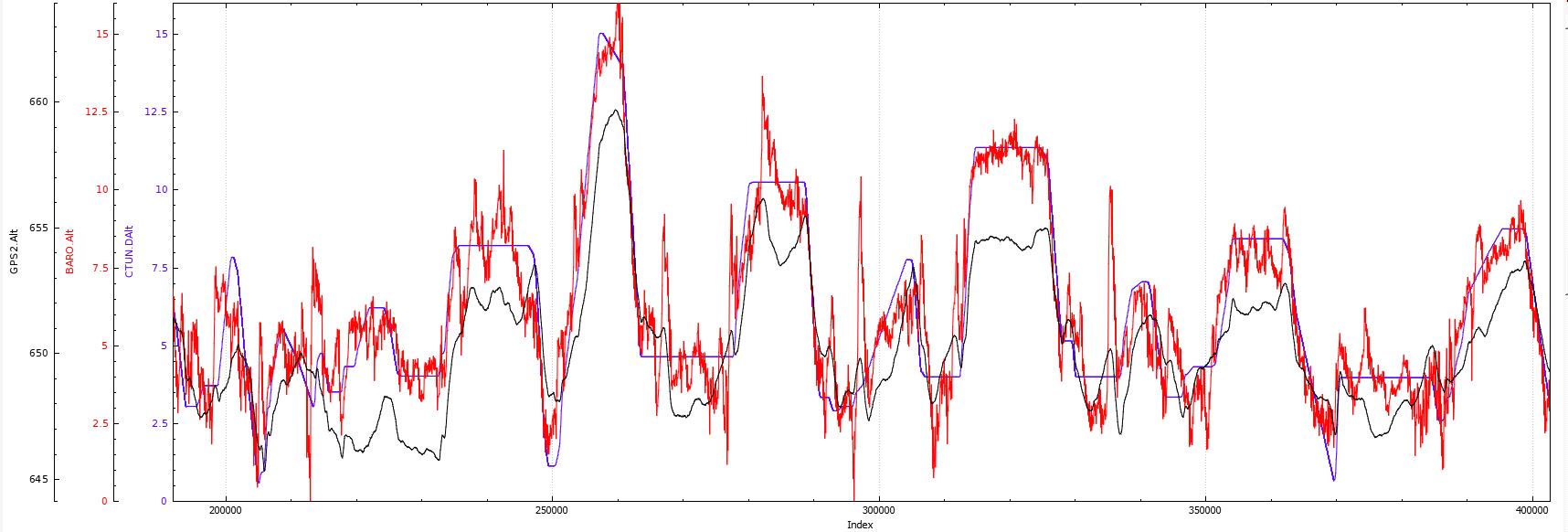
Dear Dave. How about several huge spikes in altitude. For example, in the middle of your attached chart, Dalt stays at 3 while Baro jumps from 0 to 10 meters in a second. There are several such spikes.
Several months have passed. I have not found a solution yet. May be someone can give me an advice. Is it my drone, or Cube, or the firmware? Which one to replace? What to test?