Motors stuttering position hold mode, never in stabilize mode, cube orange, flydragon 60 amp slim, frsky r-xsr, tx frysky x7s, kore carrier board. What can be the cause?
https://drive.google.com/file/d/1BSJTzi73HQjpehvy3gXiC68oNv56biNe/view?usp=drivesdk
Need to see a .bin log file, the video is not telling us much.
Please also include motor, prop and battery details.
Thanks for the reply
The one flight was in stabilize mode and other in position hold mode, in stabilize mode everthing looks great, but in posotion hold mode the copter don’t want to hover, its stable as long as I move around.
Thanks
https://drive.google.com/drive/folders/1WhgPknjsxMGcLrgXnvD4XHm2VQB1pHTW?usp=sharing
T motor 4004 300kv
Apc 16 x 5.5
Are any of those logs of an actual flight or just running it up on the ground?
Have you flown it?
Thanks for replying Mike, I was flying a bit and try hovering at 1.5m to 2 meter
I find the Actual v Desired a good starting point for seeing what might be going on.
Yours is quite noisy.
Have you autotuned?
Looking at the yaw variance in flight have you checked that all props are absolutely level?

The INS_ACCEL_FILTER is at default and might help to reduce a little, say 15 to begin with.
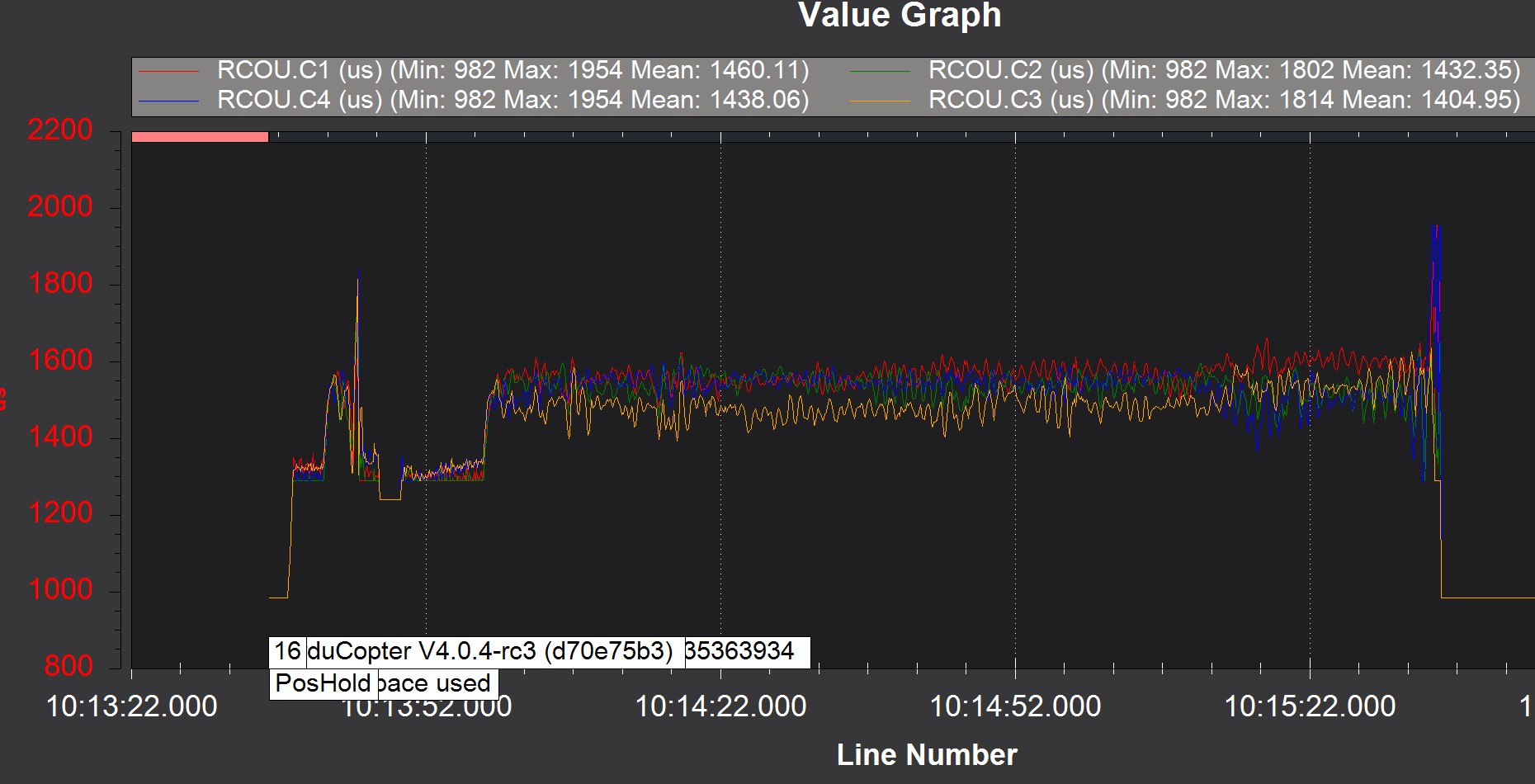
There seems to be confirmation of unlevel props from your RCOut values where M3 & M4 are working much harder than M1 & M2. Or it could be the difference in performance between your CW & CCW props.

1 Like
Thanks the one arm’s level was not the sams as the other, also rechecked the levels. Wil give it a try, still must do an auto tune.
did the alignment of motors and the servo speed much better, but still can’t hover in position hold mode,
wil try the auto tune now. nice calm day outside! wil let you know if it helped
The moment I switch to auto tune, it crash. What I don’t understand is that its so stable in stabilize mode, don’t know why they took away position mode where you can give manual throttle.
Position Hold Mode is still there if that’s what you mean but it’s largely been superseded by Loiter with new parameters added a couple rev’s ago.
If you made changes since the last one post another log.
LOL. I remember that mode back in 2015 before much more useful flight modes became available. It was also called Hybrid as I recall.
1 Like