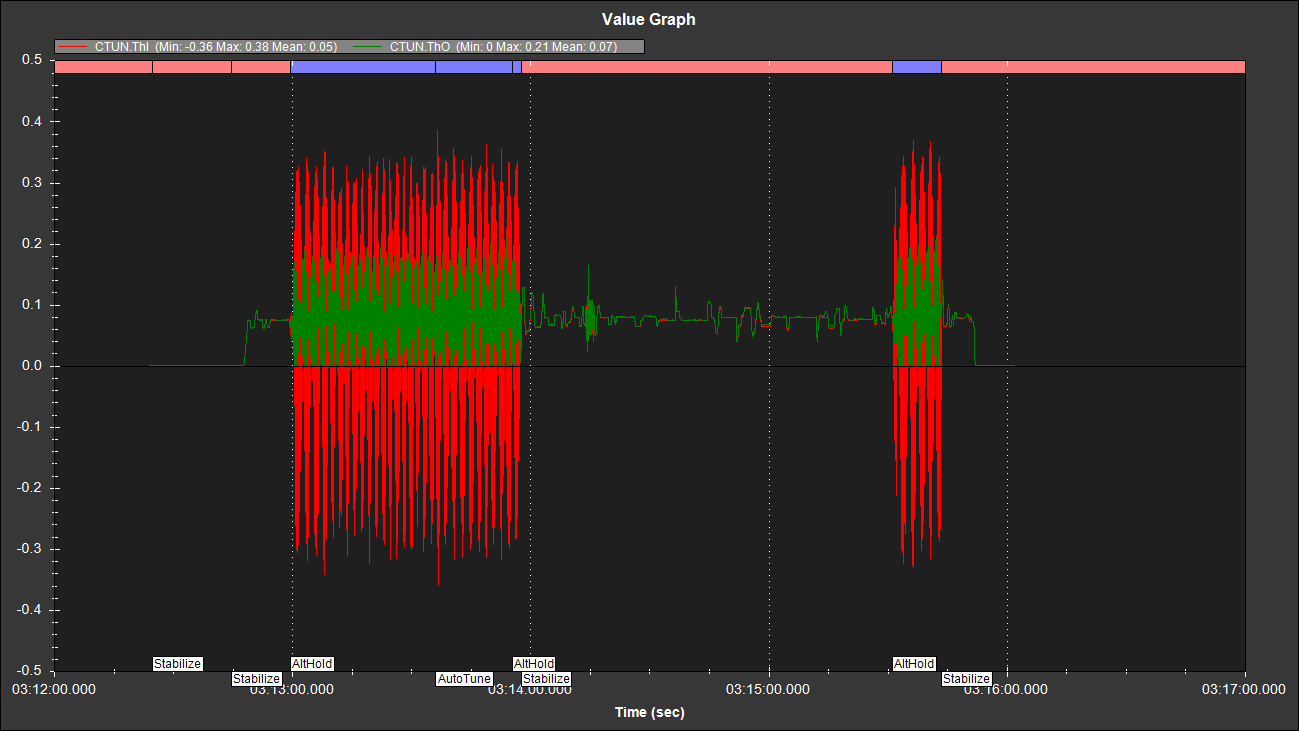
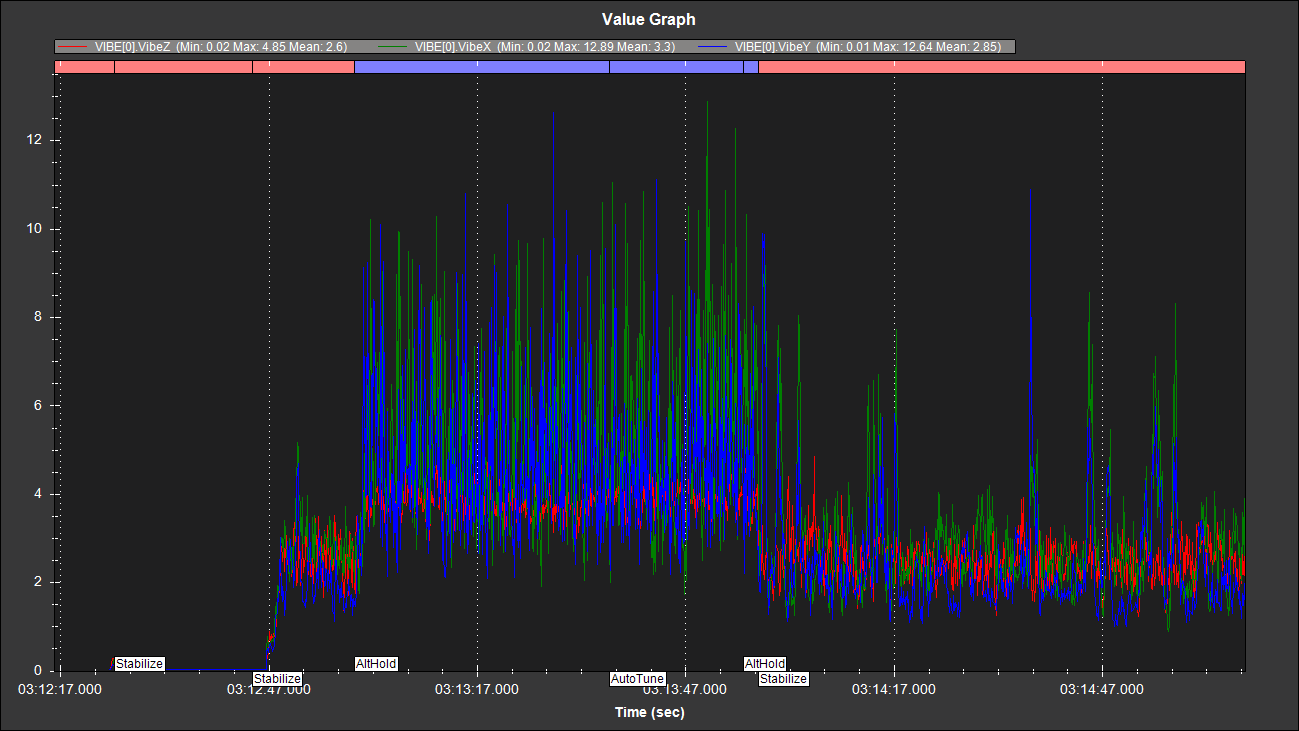
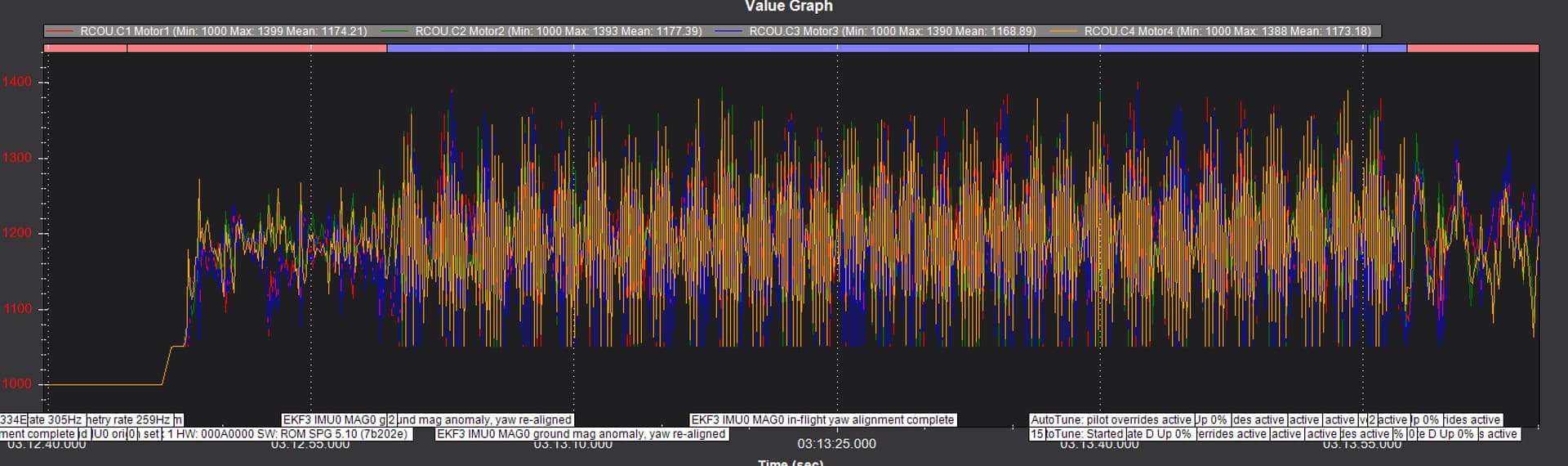
I’m a first time poster and having trouble with bouncing in alt hold mode but not in stabilize I don’t think it’s due to vibrations but I’m also not 100% sure on how to read the logs, as soon as I switch to alt hold mode the throttle input log seems to oscillate and I’m not sure why pictured below
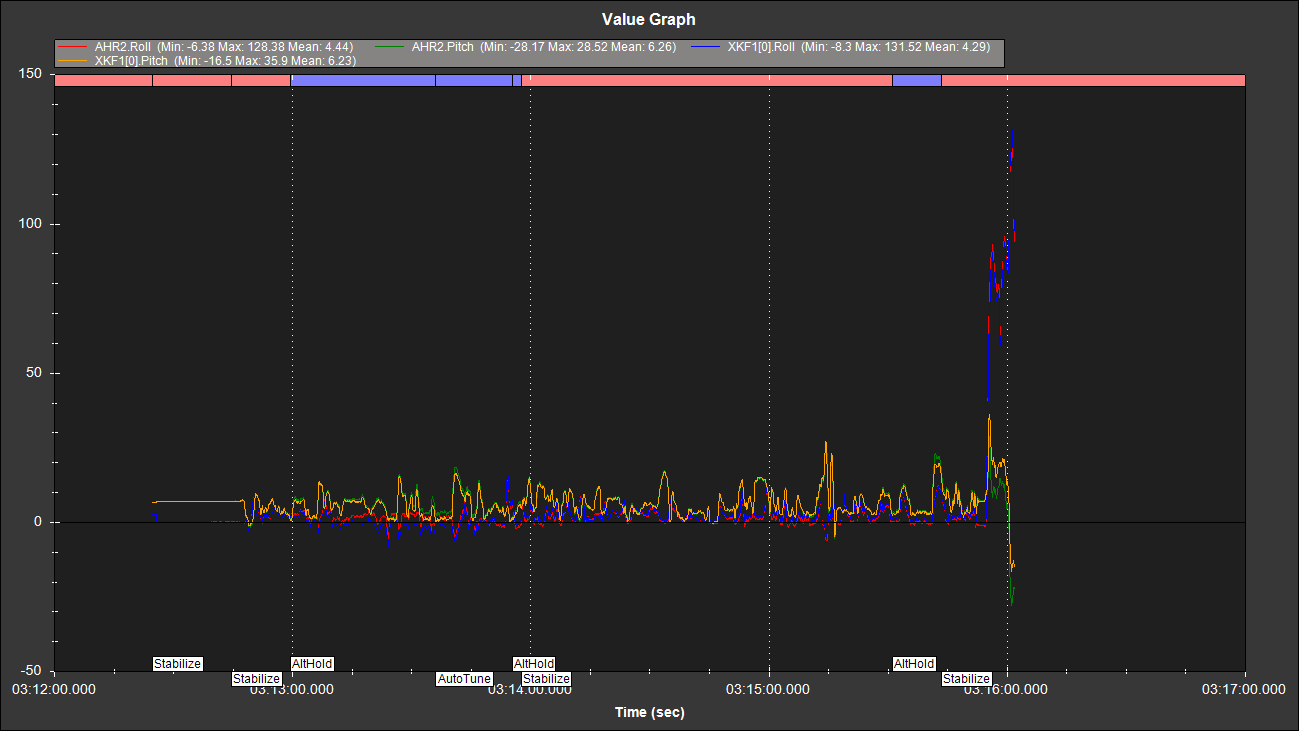
Here are my logs for comparing the attitude estimates (i.e. each AHRSs or EKFs) the pitch and roll seem to be within a few degrees of each other respectively which is good according to https://ardupilot.org/copter/docs/common-measuring-vibration.html pictured below (I dont have the greatest understanding of EKFs and AHRSs)
Im not sure if I’m missing anything or if someone would like to see more information please let me know wind conditions were extremely calm by the way I can try to make a video of it flying later if anyone thinks that would help also any input helps thanks
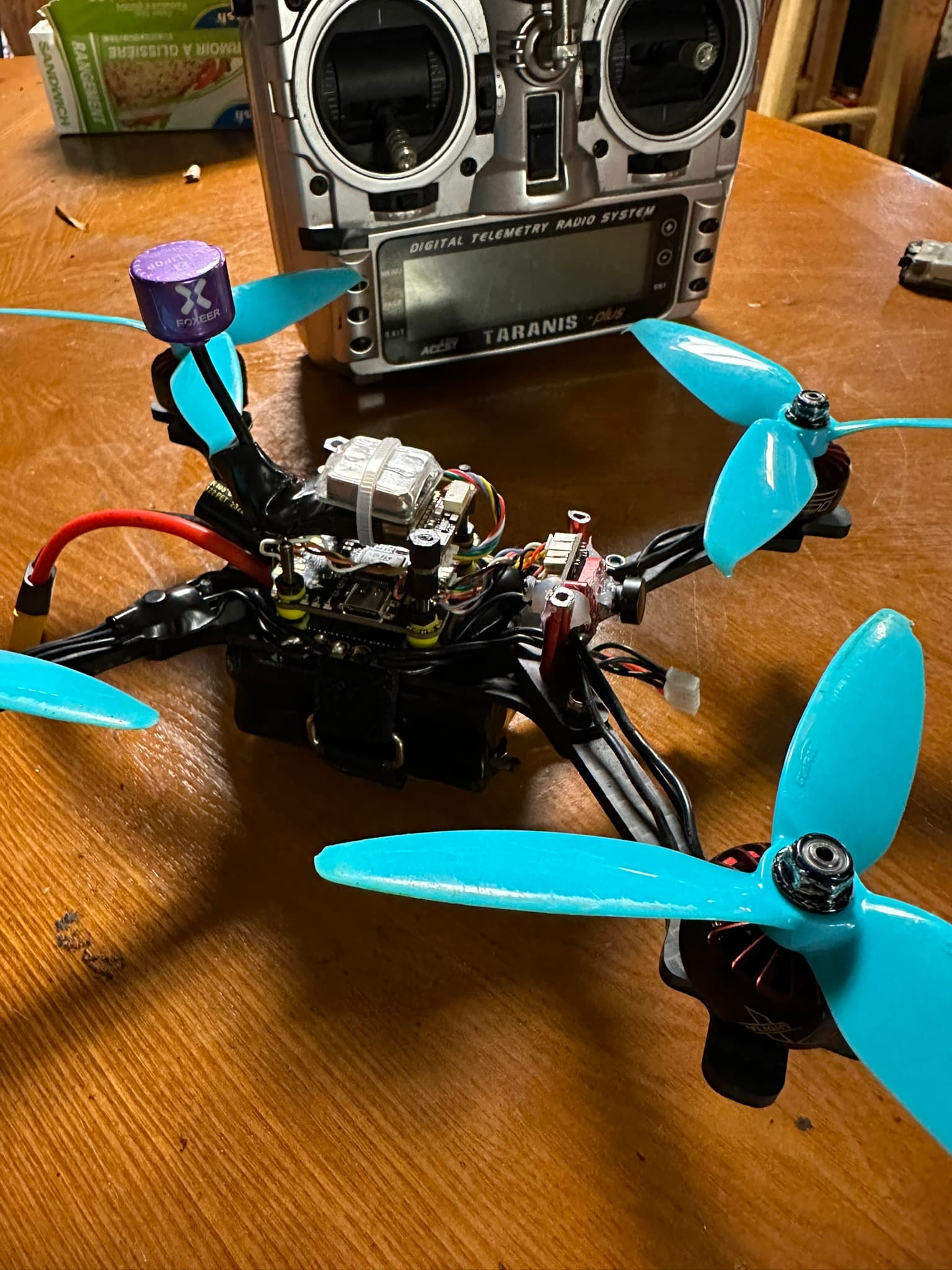
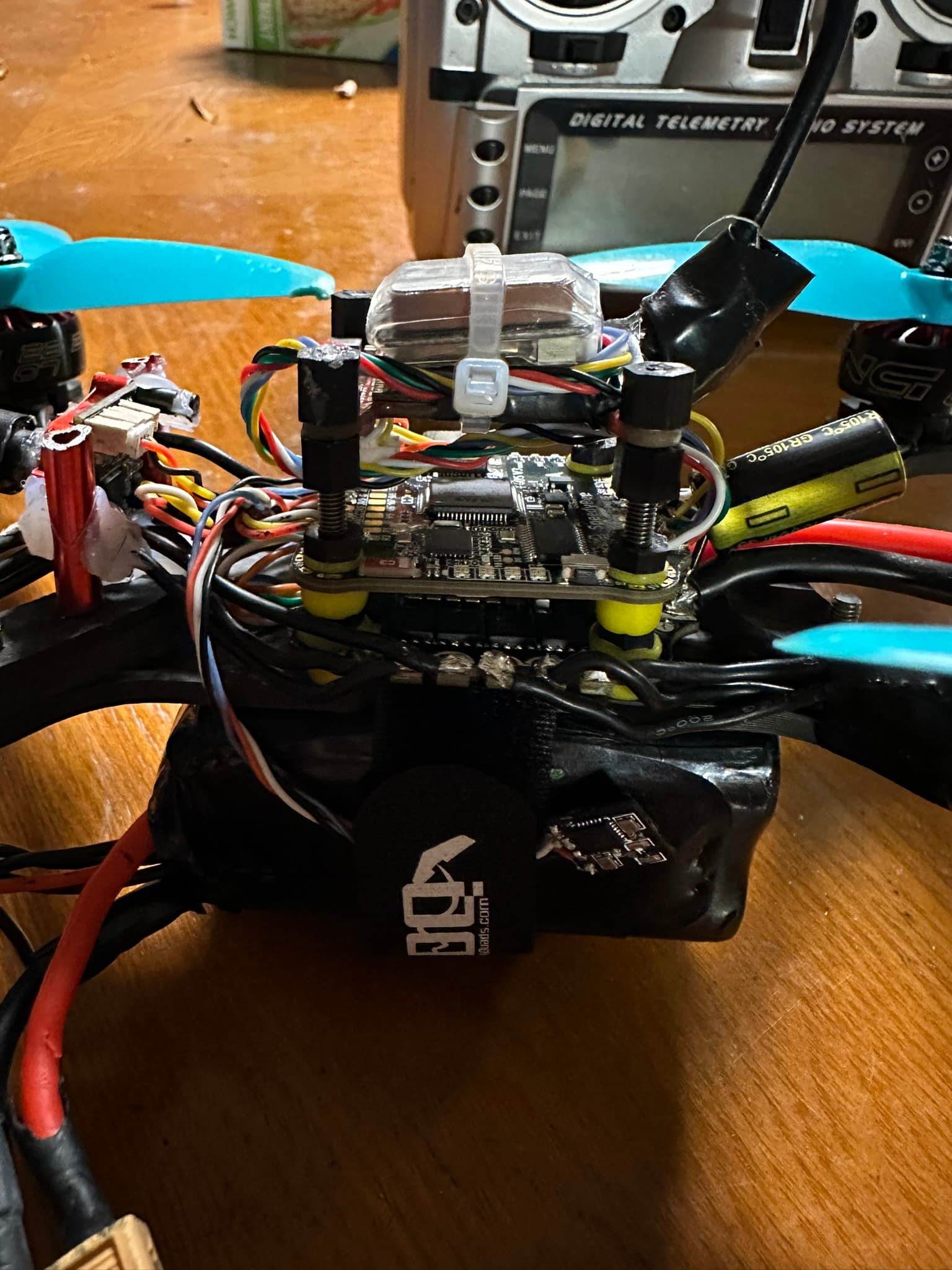
There’s a tune/setup issue. Post the .bin log of the flight and you can get more help. Videos are often little help, but a couple of pictures of the build might be useful.
There’s a lock on the download link. Can’t download it.
But in the mean time, the cable management might be part of the issue. More specifically the cap and the VTX antenna will be giant spring boards bouncing off the back. Look into the Chris Rosser videos where he talks about the effects of how a VTX antenna freely mounted like that can show up in the IMU data. Secure the antenna and the cap. Make sure no wires are bouncing on the FC. The wires shouldn’t pull or be stressed, but they shouldn’t be flopping around.
1st set these:
PSC_ACCZ_I,0.2
PSC_ACCZ_P,0.1
Then increase the Rate Pitch/Roll P&I values to something reasonable. Try .04
Set these and then do a short hover flight in AltHold to collect data to configure the Notch filter:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
No ESC telemetry?
Edit: I had a typo on the PSC_ACCZ_I parameter I noticed and fixed it (was 0.02). That would have been a big problem!!
@dkemxr thanks I really appreciate all the help I made those changes and the PID’s and did a short ALT Hold flight to collect some data that did get rid of the bouncing also now I have to do some research on the notch filters because I’ve never dealt with them before.
Yes the 4-in-1 does support esc telemetry
Ill post logs of flight a little later also