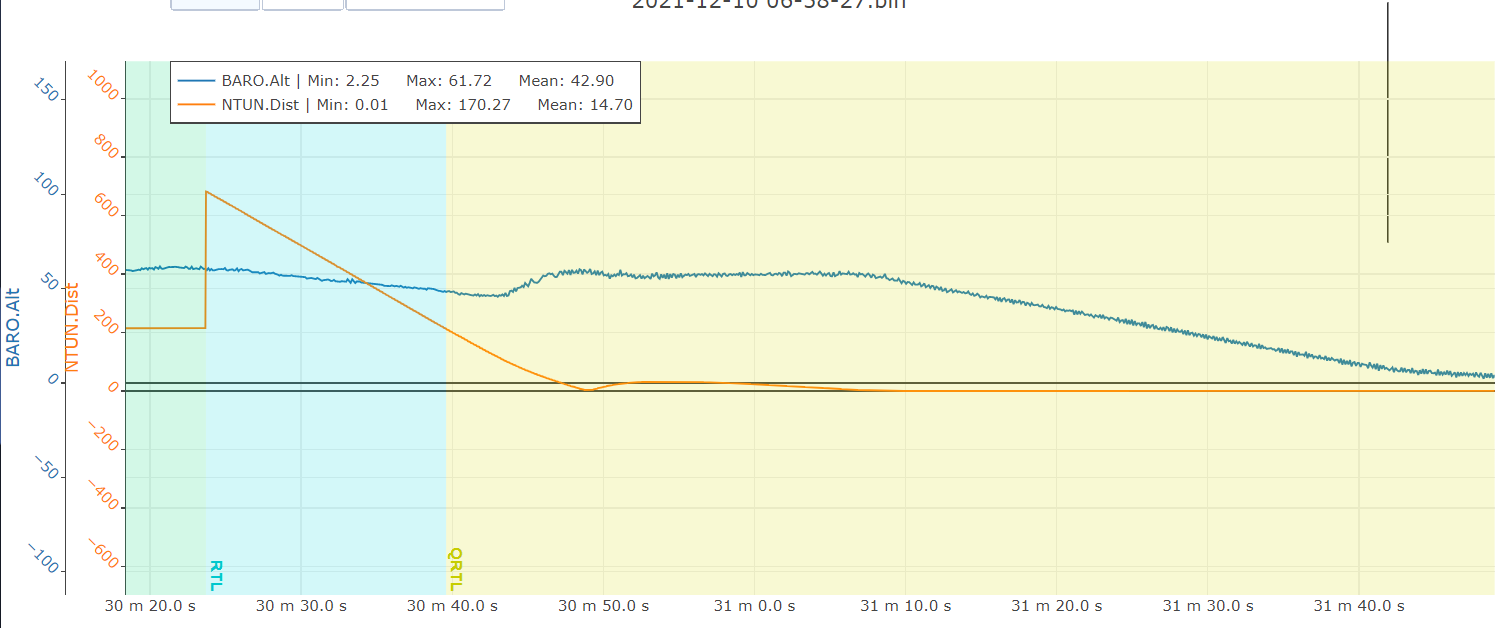
During landing, my quadplane overshoots the home position, then “reverses” for it to start descending. Initially I thought I should increase q_loit_acc_max but even with a 50% increase (120 to 180) I don’t see any improvement.
What parameter should I change to ensure the quadplane does not overshoot home position. @tridge
the Q_TRANS_DECEL is indeed way too high. The current value is 2.0. I suggest changing it to 1.0 to start with, and lower it some more if you still get overshoot
I’d also suggest you look at this tuning guide: https://ardupilot.org/plane/docs/quadplane-vtol-tuning-process.html
you seem to have skipped some of the basic tuning steps
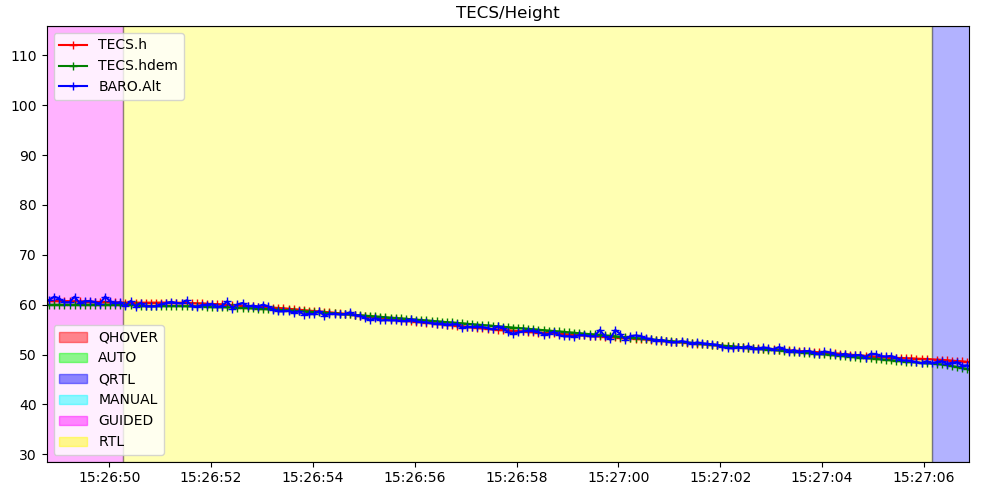
the TECS.hdem and TECS.h do track each other nicely in RTL mode:
Hello dev’s
I am having the overshoot problem with my tail sitter too. Once the VTOL transition is done from RTL, in QRTL part the behavior is unexpected. Its too difficult to save the bird and I’m losing my birds while testing RTL.
I request someone to look at the log. Link for the logs
@tailor I have not worked with tail sitters but for my quadplane, I reduced the Q_TRANS_DECEL as advised by @tridge and the overshoot issue was resolved.