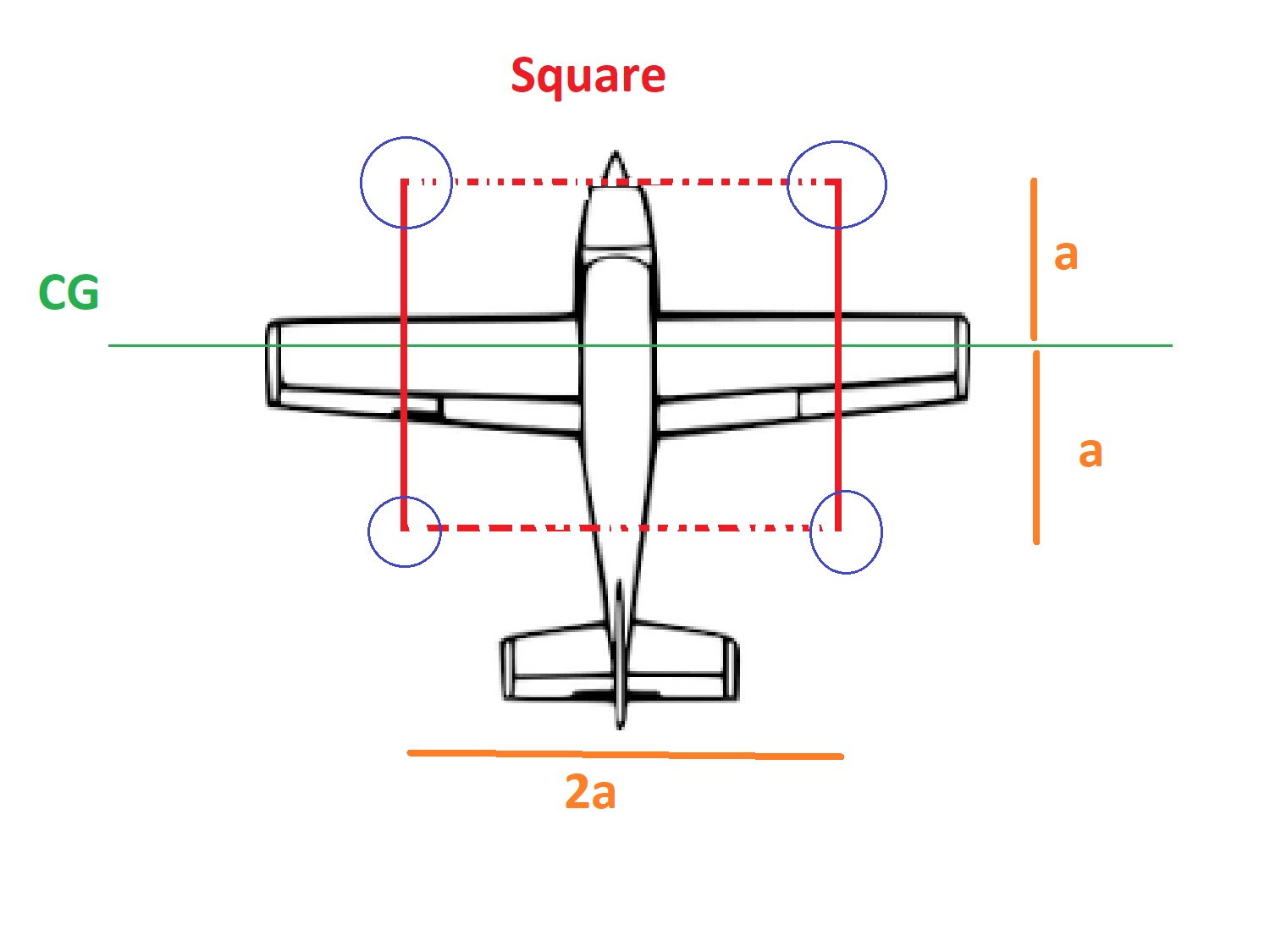
i am having a hard time tuning on of my quad planes. i made a perfect square around the CG for my motor booms. The booms are to flexible and twist. That makes it impossible to get a reliable and good YAW tune.
a = 50cm, red = boom, dotted line is just for clarification
Is pitch still reliable then?
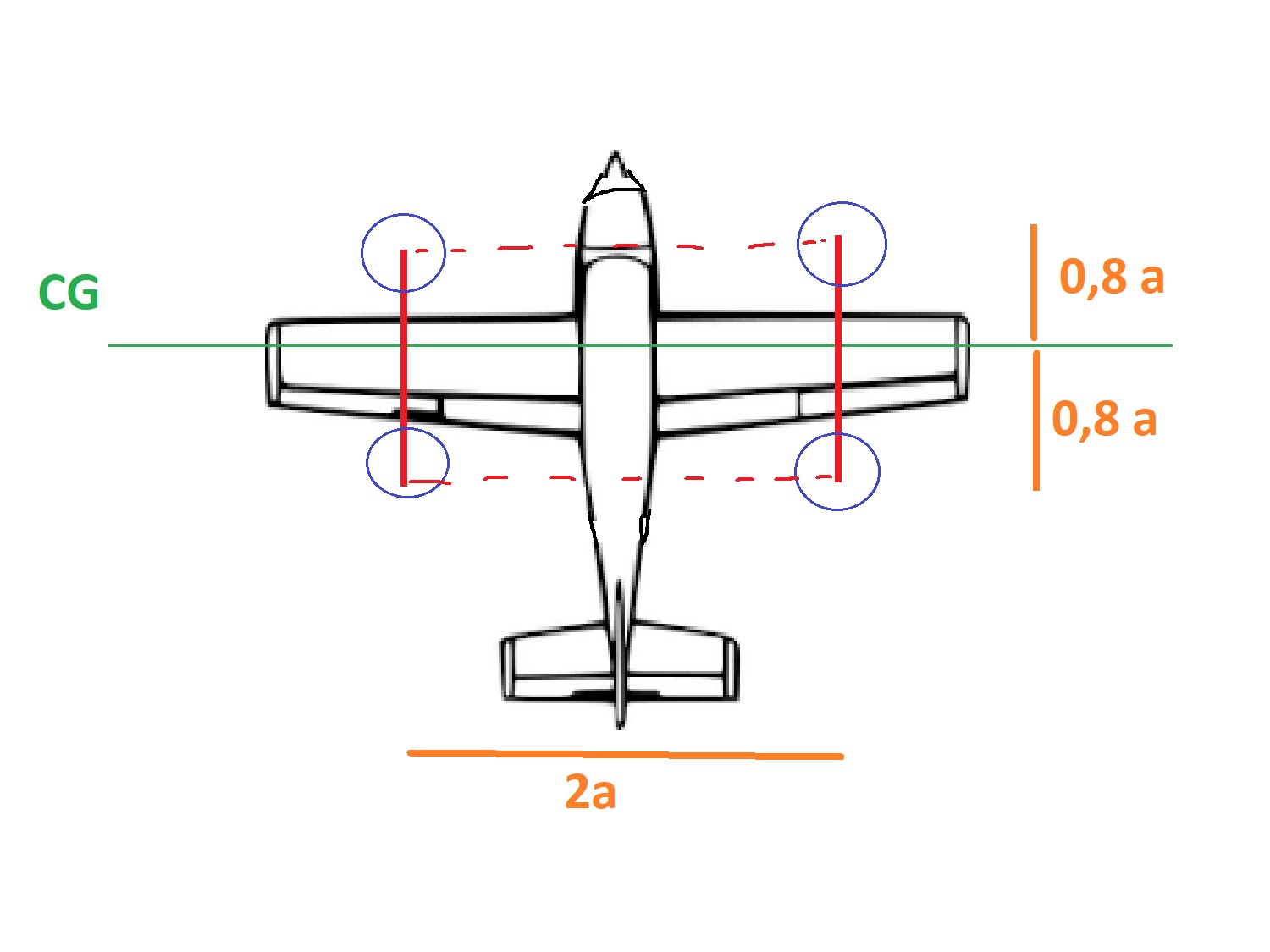
What do you think about that idea. I saw a lot of quad planes in a “non” square configuration lately. how does it influence the flight characteristics?
thanks!
Using 0.8a for length will help reduce your forces for twisting the wings up and down but it may not be enough. The plane and wing construction must be solid. You can still hover ok with 0.8a length. VTOL creates many compromises so remember that hovering is usually kept to a minimum as the plane is mostly flying forward.
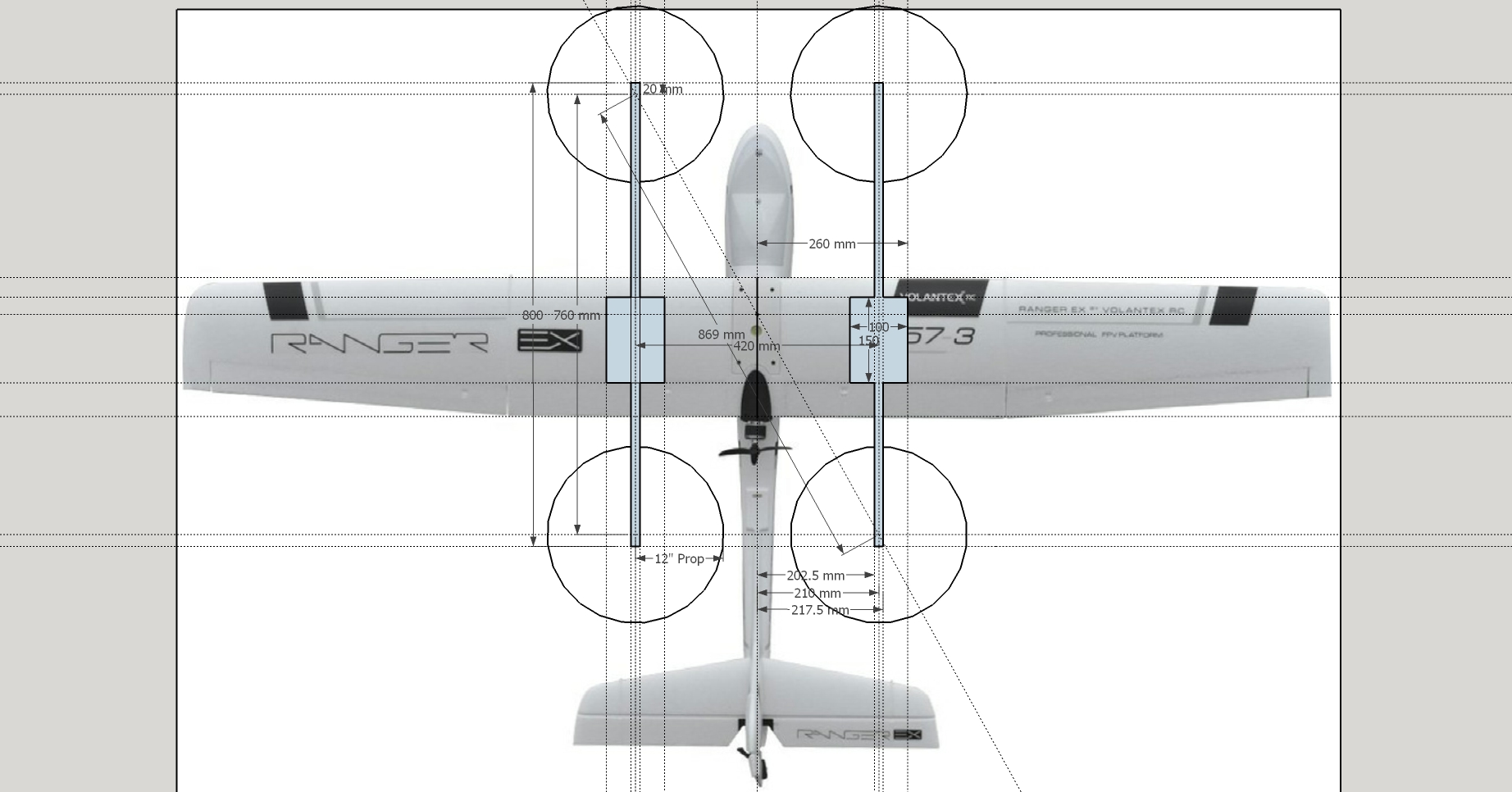
I abandoned my Ranger EX conversion years ago because the wing twist was too much without design modifications. The same quad power system has worked well in the FX-79 Buffalo 2M wing without the flexing issues.
Full disclosure: I use PX4 Stack, not ArduPilot and I’m no expert but have built a few VTOL conversions.
From my perspective, you’ve got your booms too far outboard. That exacerbates the twisting to compensate for the yaw caused by the pusher prop. I have built a Ranger EX-757 and have successfully flown it but the twisting will always be there due to the P-factor during transition as you’ll see in my video.
I later installed guy wires on mine to help mitigate the twisting.
Although my builds try to get the quad motors and booms close to CG, that’s not given priority. Immaterial of your boom location, CG should be on Fixed Wing configuration first before MultiCopter. After all, you’re going to be spending most time in FW than MC mode. In my recent builds, I’ve brought in the booms and motor positions as close to the center of the fuselage and just enough for the quad props and pusher prop to clear, being conscious of any flexing.
The 20mm square CF booms twist? That’s odd. My assumption was that your twist was see-saw, not axial. How long is 2a?
My 15mm square by 800mm carbon tubes from HK don’t twist at all. Perhaps your tube walls are thinner. Shortening your boom length will help. Also, changing the booms to carbon tubes will prevent twisting as well.