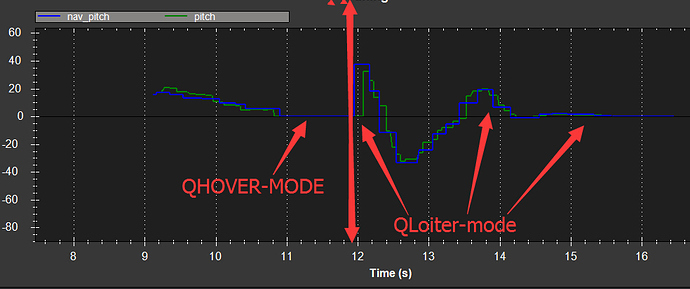
At first I fly my quadplane in FBWA mode,and then I slow down my plane and then change to Qhover mode, it acts well . I control the plane in Qhover mode until the plane stabe,without horizontal speed.At this moment I change to Qloiter mode,beyond my expecting,plane didn’t change to Qloiter stablly,the plane raise its head heavily,making strong noise and then loiter well.
I want to know why the translation is’t stable? Can the plane head don’t raise?
can you post a dataflash log file? It certainly isn’t a general problem, as I have switched from QHOVER to QLOITER a lot. The log may give me an indication as to why it is misbehaving. It could be as simple as needing a bit of tuning in the position or velocity controllers.
I don’t know how to find out the reason through the log analysising about this problem.it’s my great pleasure if you can show me.
I post the logs here download
Please let me know if you can’t download it .
sorry for the slow reply.
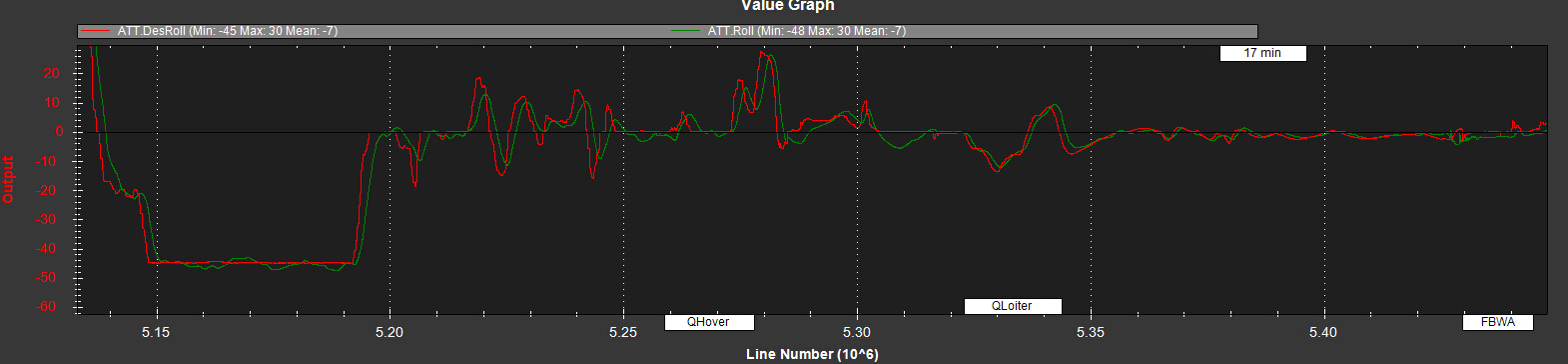
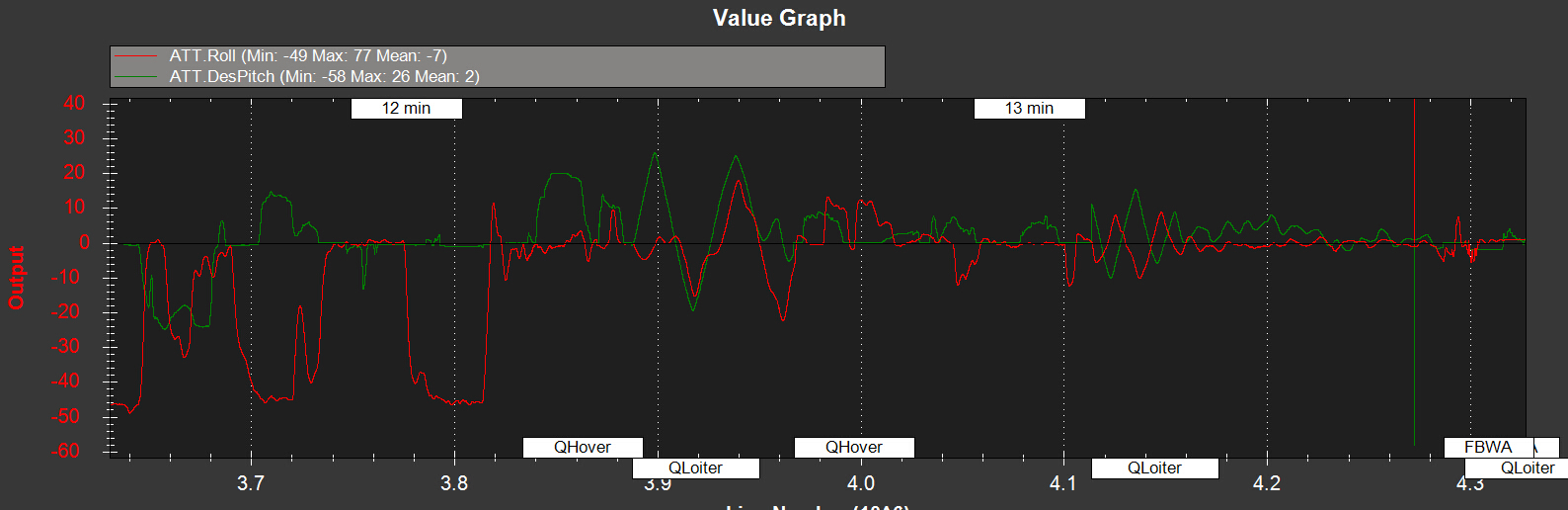
It looks like the code is working correctly, it is just being too agressive in bringing the speed from 1m/s down to zero when you enter QLOITER.
To fix this you can lower Q_WP_LOIT_MAXA from 250 down to 150, and lower Q_WP_LOIT_JERK from 1000 down to 250. That will make the transition a lot smoother.
I’ve also added more detailed velocity control logging for the next release which will make this sort of issue easier to diagnose.
hi,tridge,thanks for your reply.
Although I don’t know what the “Q_WP_LOIT_MAXA” and “Q_WP_LOIT_JERK” means, I try your para. The transition seems more smoother. But it seem like that the PID was affected after I adjusted the para. My plane become more wobbly than before.I think the transition may be unstable as before if I redo the PID tuning.Is it right?
Graph before I changed the para