Hi all,
I made some test flight with my mini talon quadplane - 2 tilt motors at the front - but can’t make it very stable in Qloiter mode.
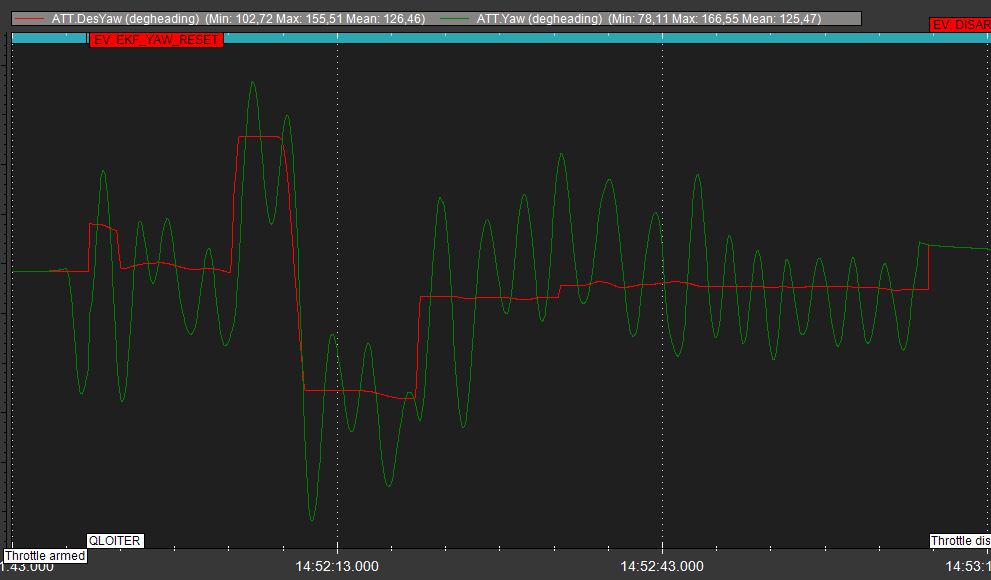
It suffers from permanent yaw oscillation I can’t get rid of and when yawing it’s like an elastic and almost return the intial position.
Autotune does not complete and says that a manual tunning must be done.
Try to change PID values without real success. Rising P make it faster ok but the plane doesn’t keep the desired position.
Any tips on what are the values I could put to start with ?
Thaks a lot if some log expert reader could help me on that ![]()
thanks!