Hello,
I have a non vectored double-motor tailsitter configured to receive position input from Optitrack system. I am facing two problems that I think should be connected somehow.
-
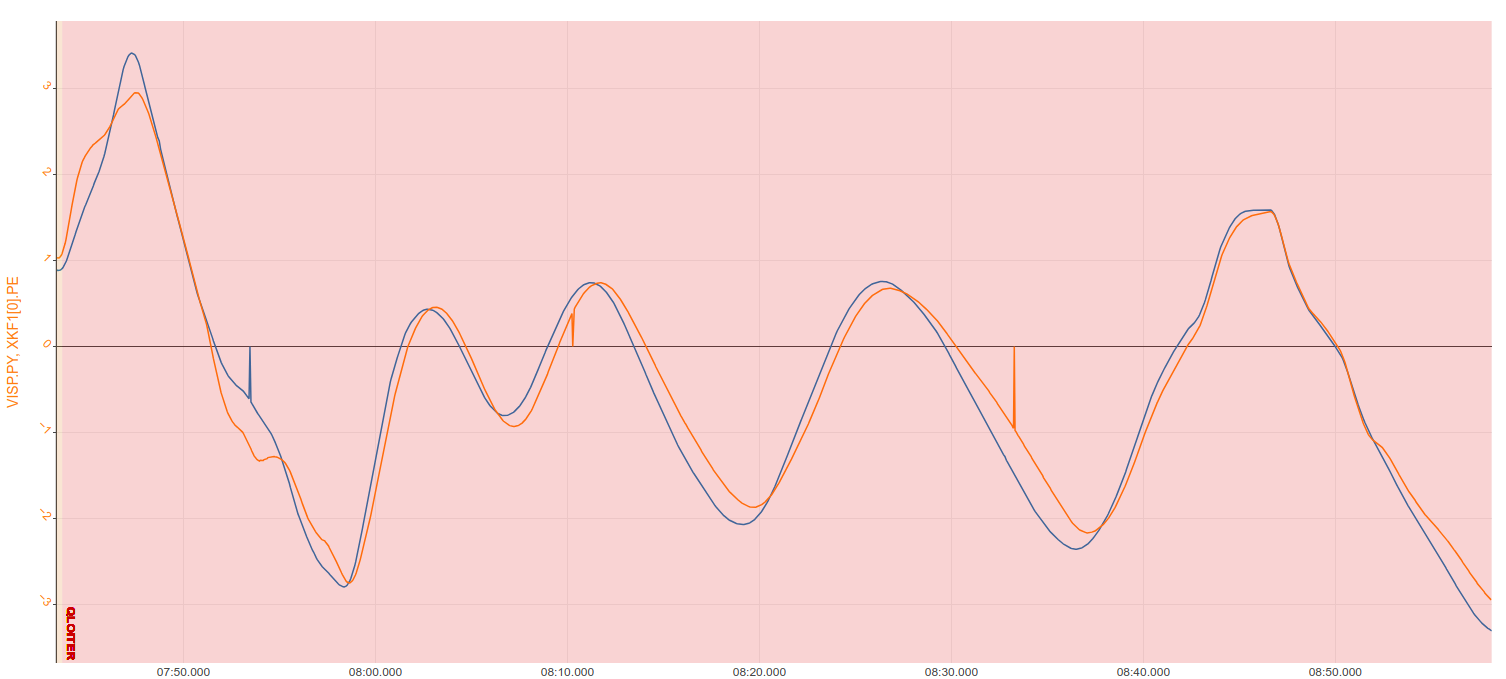
I notice that the EKF is not good, there are some differences here and there and in general there is some lag.
VISP.PX (Optitrack X input) and XKF1[0].PD (EKF Estimation)
-
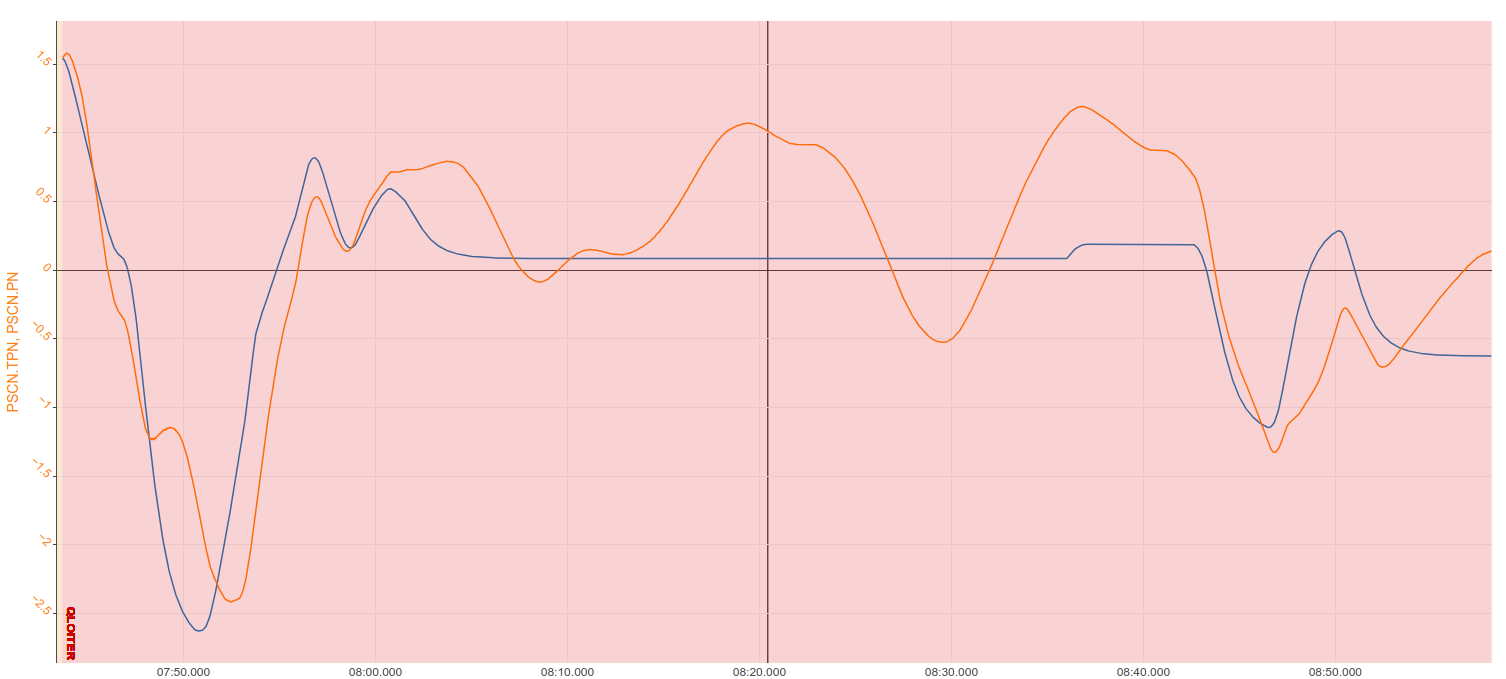
On the second issue, it can be seen that the position is somehow tracked (still there is a significant error) when the pilot moves the sticks but when no input is given the drone oscillates a lot on the XY plane. Z is better.
PSCN.TPN (Target North position) and PSCN.PN (actual North position)
If anyone could have a look at the Flight log and provide any ideas it would be very helpful!
Flight Log: Qloiter-osc.bin - Google Drive
EDIT 1. The oscillations part seems to be similar to the “toiletbowl” effect but it is strange since I have disabled the compass (COMPASS_ENABLE = 0, COMPASS_USE/2/3 = 0) and yaw in fed from optitrack (EK3_SRC1_YAW = 6)