Hi all,
I am tuning a tailsitter with 2 non-vectored motors in QHOVER. I notice that the plane’s vertical motion is not responsive (it seems like 1 -1.5 sec lag). For that reason I analyzed the logs and I found the following.
Flight log: 30 01-01-1980 01-00-00.bin - Google Drive
-
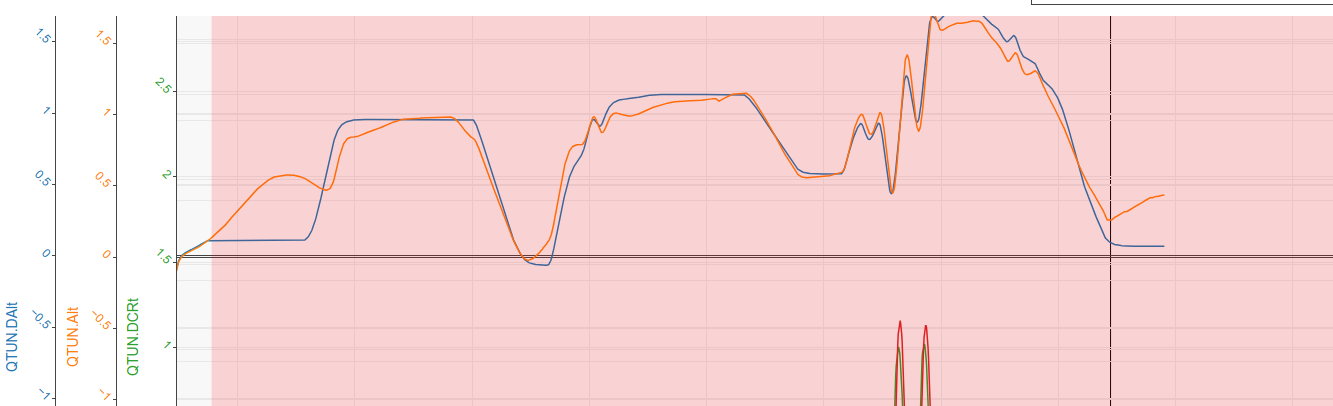
The Z position follows quite well the Desired one.
-
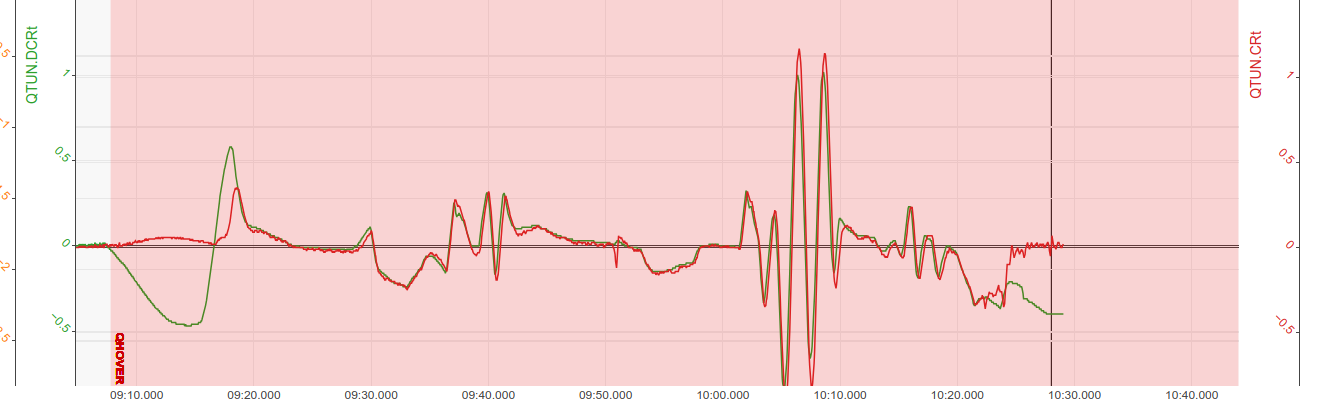
The Climb rate follows well the desired one, as well.
-
But, when I plot the throttle (RCIN.C3) with the desired (commanded) vertical speed I notice that there is a delay of around 1 sec. In particular, passing from mid-stick to higher throttle input values does not immediately get translated to positive vertical velocity as can be seen in the zoomed in plot below.
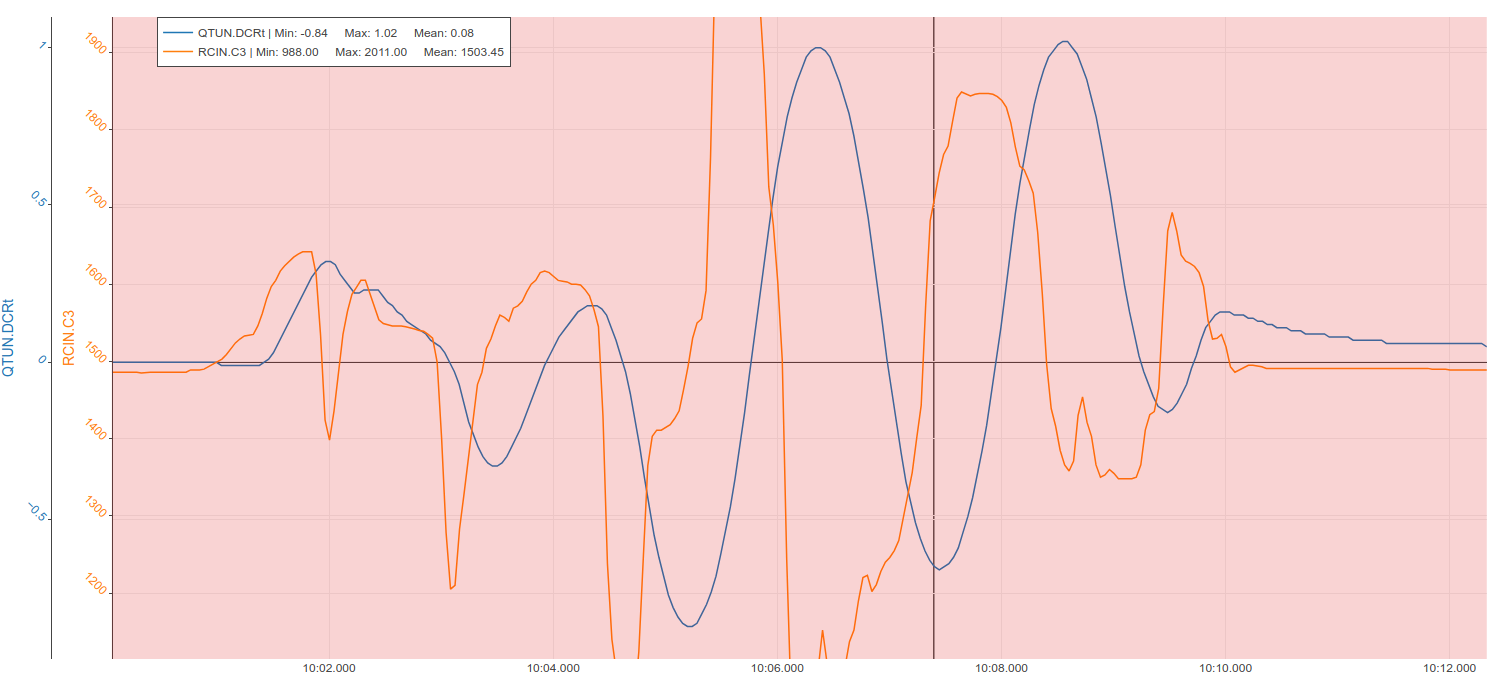
Is this normal? Am I missing anything?