I’m trying to get an EFlite Extra 300 to hover. It flies pretty well in FBWA, but as soon as I switch to one of the Q modes, the controller cuts the throttle to min, and the transition never occurs.

Logs:
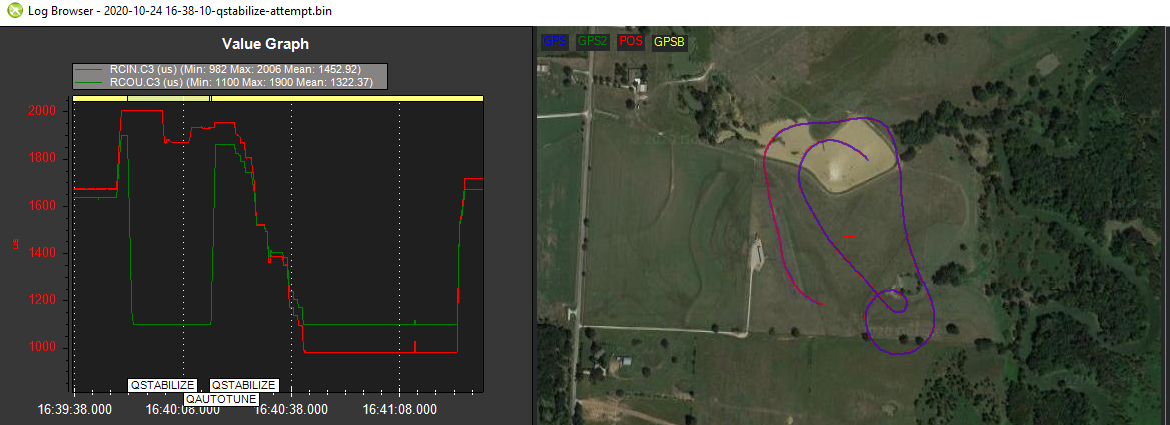
https://github.com/arikrupnik/ardupilot-config/blob/master/logs/FIXED_WING/4/2020-10-24%2016-38-10-qstabilize-attempt.bin?raw=true
https://github.com/arikrupnik/ardupilot-config/blob/master/logs/FIXED_WING/4/2020-10-24%2015-34-15-qhover-attempt.bin?raw=true
